Расчет элементов управляемого выпрямителя, системы импульсно-фазового управления на операционных усилителях
Учитывая, что:
напряжение регулирования Up = UВХ1 = ± 3,3(В),
амплитуда треугольного напряжения Uп = UВХ2 = ± 3,3(В),
максимальный ток нагрузки IН=IБ1=0,0008(А),
минимальное выходное напряжение Uн min = UБЭ1 = 3(В),
принимаем в качестве схемы сравнения операционный усилитель DA2 типа К153УД5 у которого:
Uвых.max=10(B), Iвых.мах=5(мА), Rвых.оу=150(Ом); Коу=125*10 3.
<
img width=364 height=175 src="images/referats/15376/image112.png" alt="Підпис: ">
Рисунок 2.6 — Схема сравнения СИФУ
Определим напряжение переключения операционного усилителя:
![]()
Величина сопротивления резистора R* определяется из соотношений:
R*>Rвых.оу=150(Ом);
![]()
Принимаем резистор R* типа МЛТ-0,125-2,4кОм±10%.
Величины сопротивлений резисторов R11=R12 определим из следующих условий:
![]()
![]()
Принимаем резисторы R11, R12 типа МЛТ-0,5-2,7мОм±10%
Величину сопротивления резистора R13 (делителя напряжения) определим, если примем, что ток делителя напряжения Iд=(5…10)Iвх.оу.

Исходя из этого, принимаем резистор R13 типа СП-0,15-2,4(мОм)±20%.
2.8 Расчет схемы подавления помех
В данной схеме (рисунок.2.7) резисторы R14, и R15 являются разрядными и в тоже время выполняют роль делителя напряжения Еп. Обычно ток делителя принимают в 10 раз меньше тока потребления, т.е. 10 Iд = Iпотр.

Рисунок 2.7– Схема подавления помех
Ток потребления СИФУ составит:
![]()
Ток делителя через резисторы R14 и R15 составит:
![]()
Величина резистора R14 определяется из условий:
![]()
Принимаем резисторы R14 и R15 типа МЛТ-0,5-1600Ом±5%.
Ёмкость конденсатора определим по следующей формуле:
![]()
Тогда:
![]()
Из справочника принимаем конденсаторы С9 и С10 типа К73-5-0,3мкФ±5% .
3. Расчёт источника питания
3.1 Выбор схемы и расчет основных параметров источника питания
Для выбора схемы источника питания рассчитаем суммарный ток нагрузки:
![]() ,
,
где ![]() - ток нагрузки,
- ток нагрузки,
![]() - общий ток потребления СИФУ (в схеме их 12 штук, подключённых параллельно к стабилизатору).
- общий ток потребления СИФУ (в схеме их 12 штук, подключённых параллельно к стабилизатору).
Зная ток нагрузки ![]() и напряжение нагрузки
и напряжение нагрузки ![]() примем в качестве схемы стабилизатора схему параметрического стабилизатора напряжения (рисунок 3.1) .
примем в качестве схемы стабилизатора схему параметрического стабилизатора напряжения (рисунок 3.1) .
|
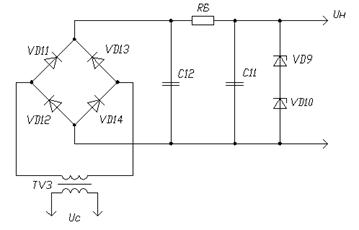
Рисунок 3.1 – Схема источника питания
По справочнику по известному току нагрузки выбираем 2 стабилитрона Д815В со следующими параметрами:
![]()
![]()
![]()
Следует отметить, что в схеме стабилитроны VD7 и VD8 ставятся последовательно для обеспечении стабилизации нужного напряжения и в сумме дают необходимое напряжение (одного не хватает).
Рассчитаем параметрический стабилизатор исходя из следующего из условия: ![]() .
.
Воспользуемся следующей формулой:

где ![]() - выходное напряжение,
- выходное напряжение,
![]() - минимальный ток стабилитрона,
- минимальный ток стабилитрона,
![]() - максимальный ток стабилитрона,
- максимальный ток стабилитрона,
![]() - балансное сопротивление;
- балансное сопротивление;
![]() - сопротивление нагрузки;
- сопротивление нагрузки;
![]() - входное напряжение.
- входное напряжение.
Определяем ![]() и
и ![]() из уравнений приведенных выше учитывая то, что напряжение сети может колебаться в пределах +0,05 U1 .-0,15 U1:
из уравнений приведенных выше учитывая то, что напряжение сети может колебаться в пределах +0,05 U1 .-0,15 U1:
![]()
Решив данную систему уравнений, получим:
![]()
![]()
Таким образом, минимальное и максимальное напряжения принимают следующие значения:
![]()
![]()
Для выбранных ![]() и
и ![]() определим минимальный и максимальный токи стабилизации:
определим минимальный и максимальный токи стабилизации:
![]()
![]()
Определяем мощность рассеяния на резисторе RБ:
![]()
По справочнику выбираем:
Резистор RБ типа ПЭВ-18-27Ом±10%.
конденсатор С11 типа К50-6-100 мкФ±5%.
конденсатор С12 типа К50-6-1000 мкФ±5%.
3.2 Расчёт однофазного мостового выпрямителя и трансформатора
Найдём величину выпрямленного напряжения:
![]()
Определим анодный ток![]() на диодах:
на диодах:
![]()
Определим максимальное обратное напряжение на диодах:
![]()
Необходимо учесть, что из-за использования фильтра максимальное обратное напряжение на диодах примет удвоенное значение:
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем