Проектирование и расчёт микронного многооборотного микроиндикатора
Кулисные механизмы, изображенные на рис.2б, в, обеспечивают различные направления вращения ведущего и ведомого звеньев;
если же АВ > l , то эти звенья вращаются в одном направлении (рис. 2г, д).
Схемы с ведущим кривошипом (рис. 2б, г) благоприятны в отношении углов давления ( a = 0 ). При ведущей кулисе (рис. 2, е, д) во избежание большого трения необходимо выполнить условие :
(знак плюс для схемы на рис. 2 е, минус — для схемы на рис. 2 д).
Во многих случаях кулисный механизм с высшей парой играет роль передаточно-множительного механизма приборного устройства и служит для приближенного воспроизведения заданной линейной зависимости между углами поворота j и g ведущего и ведомого звеньев при ограниченных величинах этих углов.
Рис 2(а, б, в, г, д, е)
Функция положения механизма в виде зависимости угла поворота g ведомого звена от угла поворота j ведущего звена (углы отсчитываются от линии АС стойки, положительные направления их показаны на чертеже) выражается следующими формулами:
при ведущем кривошипе (рис. 2, б, г).
(знак плюс для схемы на рис. 2, б, минус для схемы на рис. 2, г);
В данном случае необходимо взять знак “ – “.
Передаточная функция (мгновенное передаточное отношение) механизма находится дифференцированием формулы (8), для схемы по рис. 2, г при ведущем кривошипе :
При малых значениях угла j в формуле (9):
Следовательно, в этом случае механизм обеспечивает приближенную линейную зависимость между g и j.
Для кулисного механизма.
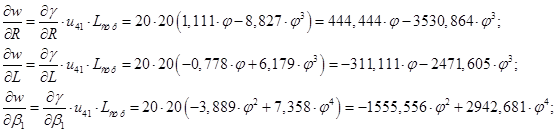
1. Погрешность dR в длине кривошипа.
Коэффициент влияния:
2. Погрешность dL в расстоянии между осями.
Коэффициент влияния:
3. Перекос плоскости кулисы 2 на угол db1 .
Коэффициент влияния этой ошибки определяется с учётом передаточного отношения:
Погрешность начального положения ведущего звена (кулисы 2, жёстко связанной с рычагом r) уже учтена в синусном механизме.
Расчёты и вычисления
Определим кинематические параметры отсчётного устройства, обеспечивающего при заданных габаритах измерение в заданных пределах с нужной точностью с учётом заданного расстояния между соседними штрихами и цены деления шкалы.
Число штрихов на шкале точного отсчёта
NT = p*D/x = 114,24 @ 115
K= 1/(NT*C) @ 9
Стрелка делает 9 полных оборотов.
Этому соответствует 9 основных делений на шкале грубого отсчёта, стрелка которой совершает один полный оборот.
Определим диаметр шкалы грубого отсчета D1 из условия:
D / D1 = К
Откуда D1 = D/K = 40/9 = 5 (мм).
Проектирование зубчатой передачи
Передача движения от кривошипа кулисного механизма к стрелке осуществляется двухступенчатым редуктором z1-z2-z3-z4. Параметры колёс определяем исходя из условия максимального передаточного отношения при заданных габаритах. С другой стороны, следует учитывать соображения технологичности, которые накладывают ограничения на уменьшение диаметра ведомых колёс зубчатых пар. С учётом этого, диаметры d2 и d4 выбираем равными 4мм. Диаметры d1 и d3 определяются габаритами прибора: d3=10 мм; d1=20 мм.
Исходя из того, что оптимальное количество зубьев малых колёс Z2=Z4=20, произведём выбор общего модуля редуктора, учитывая, что величина модуля в данном случае не ограничивается требованиями прочности, так как редуктор переносит достаточно малую нагрузку:
m = d4 / Z4 = 4 / 20 = 0.2
Исходя из этого, подсчитаем количество зубьев ведущих колёс:
Z1 = d1 / m = 20 / 0,2 = 100
Z3 = d3 / m = 16 / 0,2 = 80
Подсчитаем общее передаточное отношение редуктора:
i41 = (Z1*Z3) / ( Z2*Z4) = (100*80) / (20*20) = 20
Получим величину угла зубчатого сектора Z1 :
j z = (К / i41) * 360° = (5 / 20) * 360° = 90°
Количество зубьев сектора:
Z = (j z / 360°) • Z1= (90°/360°)*100 =25
Следовательно, длина дуги сектора:
L = j z *p *d1 / 360 ° = 16 (мм).
Определим параметры зубчатого колеса Z5 . На каждые 9 оборотов колеса Z4 колесо Z5 должно делать один полный оборот, поэтому:
Z5 = К * Z4 = 9 * 20 = 180.
d5 = m * Z5 = 0,2 * 180 = 36 (мм).
Полное передаточное отношение:
i51 = Z1 * Z3 * Z4 / ( Z2 * Z4 * Z5) = Расчет суммарной погрешности всего механизма
Определим суммарную погрешность работы зубчатого редуктора.
1. Определяем межосевые расстояния зубчатых пар для условного модуля m*=0,5:
2. Определяем передаточные числа от валов III, II к валу I:
3. Определяем люфтовую погрешность сопряженных пар для степени точности 7H и m=0,5:
4. Вносим поправки на вид сопряжения, степень точности и модуль каждой пары. Колеса изготавливаются для класса точности 6G:
5. Находим суммарную угловую погрешность:
6. Упругим мертвым ходом можно пренебречь, ввиду малой нагрузки на выходной вал 7. Находим собственные кинематические погрешности всех колес:
8. Определяем суммарную кинематическую погрешность передачи:
9. Находим общую погрешность передачи:
Определяем суммарную погрешность редуктора.
1. Пересчитываем все погрешности передачи на линейное перемещение стрелки 1.1. Синусный механизм
1.2. Кулисный механизм
1.3. Зубчатый редуктор
2. Находим выражение для суммарной ошибки:

![]() (8)
(8)

![]()
![]() (9)
(9)
![]()




![]() .
.
![]()

![]()
![]()
![]()
![]() Отсюда суммарная величина мертвого хода
Отсюда суммарная величина мертвого хода ![]()

![]()
![]()
![]() :
:

![]()
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела