Система автоматического управления регулируемым электроприводом
где ![]() - коэффициент передачи механической части двигателя, а
- коэффициент передачи механической части двигателя, а ![]() - механическая постоянная привода.
- механическая постоянная привода.
Таким образом, не учитывая нелинейности и внутренние обратные связи для упрощения вычислительных операций, можем записать передаточную функцию РЭП, которая с достаточной
точностью описывает процессы в аналоговой системе:
![]() .
.
Обозначим произведение всех постоянных коэффициентов как
![]() ,
,
тогда
 .
.
Передаточная функция неизменяемой части с учетом фиксатора:
 ;
;
 .
.
Определим дискретную передаточную функцию приведенной неизменяемой части при ![]() и
и ![]() , учитывая, что в описании неизменяемой части имеются элементы запаздывания вида
, учитывая, что в описании неизменяемой части имеются элементы запаздывания вида ![]() , для которых следует применять модифицированное z-преобразование [6]:
, для которых следует применять модифицированное z-преобразование [6]:
 .
.
Рассмотрим множители полученного выражения более детально:
1)  =
= ,
,
где  , соответственно,
, соответственно,  .
.
2)  ,
,
где ![]() и
и ![]() , соответственно,
, соответственно, ![]() .
.
3)  ,
,
где ![]() и
и ![]() , соответственно,
, соответственно, ![]()
Тогда



Обозначим
![]() ,
, ![]() ;
;
![]() ,
, ![]()
Таким образом, передаточная функция приведенной неизменяемой части:
![]() ;
;
![]() .
.
Из анализа исходной аналоговой системы ![]() . Подставив значения получим:
. Подставив значения получим:
![]()
![]() ;
;
![]() .
.
4.3.2 Определение желаемой дискретной передаточной функции
Основой для синтеза регулятора скорости являются заданные статические и динамические параметры САУ электропривода, по которым определяется желаемая дискретная частотная характеристика системы ![]() . Зная частотную характеристику неизменяемой части системы
. Зная частотную характеристику неизменяемой части системы ![]() , можем определить частотную характеристику регулятора как
, можем определить частотную характеристику регулятора как
![]() .
.
Тип желаемой частотной характеристики зависит от требуемого порядка астатизма. В справочниках [7, 8] приводится несколько видов типовых ЛАЧХ, которые полностью определяются заданием четырех величин: коэффициента усиления ![]() и трех сопрягающих частот. Один из возможных вариантов желаемой характеристики приведен на рисунке 4.3.2. Описывается она следующим выражением:
и трех сопрягающих частот. Один из возможных вариантов желаемой характеристики приведен на рисунке 4.3.2. Описывается она следующим выражением:
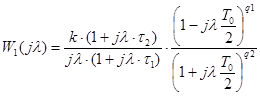
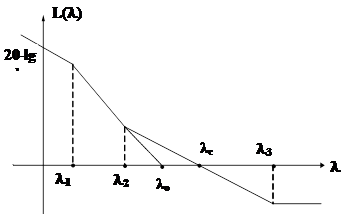
Рисунок 4.3.2 – Желаемая логарифмическая частотная характеристика
Значения параметров выбранной желаемой частотной характеристике рассчитываются следующим образом:
1) эквивалентная частота гармонического управляющего воздействия:
![]() ;
;
![]() с-1;
с-1;
2) коэффициент передачи разомкнутой системы
![]() ;
;
![]() , с-1;
, с-1;
3) сопрягающая частота ![]() , для которой в низкочастотной области справедливо допущение
, для которой в низкочастотной области справедливо допущение ![]() :
: ![]() с-1;
с-1;
4) базовая частота запретной области ЛАЧХ ![]() :
:
 ;
;
 с-1;
с-1;
5) сопрягающую частоту ![]() определяем по показателю колебательности
определяем по показателю колебательности ![]() , приняв М=1,2:
, приняв М=1,2:
![]() ,
,
![]() с-1;
с-1;
6) третья сопрягающая частота ![]()
![]() ;
;
![]() с-1;
с-1;
7) постоянные времени ![]() ,
, ![]() :
:
![]() ;
; ![]() с-1;
с-1;
![]() ;
; ![]() с-1.
с-1.
Таким образом, желаемая дискретная частотная характеристика описывается следующим выражением:
![]() .
.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
- Проектирование высокочастотного генератора синусоидальных сигналов
- Программная и аппаратная часть автоматизированной сигнализации по GSM каналу
- Проектирование генератора высоких частот
- Определение безотказности РЭУ при наличии резервирования замещением (резерв ненагруженный)
- Устройства автоматики на микросхемах структуры КМОП
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем