Дополнительные арифметические команды
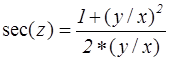
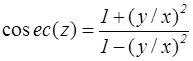
Таблица 3 – Формулы для вычисления тригонометрических функций
|
|
|
|
|
|
|
|
|


3. команды управления сопроцессора х87
В СОПРОЦЕССОРАХ 387+ появились новые команды:
Ø FSIN – вычисление синуса;
Ø FCOS – вычисление косинуса;
Ø FSINCOS – вычисление синуса и косинуса.
Все они воспринимают в ST(0) исходный угол, измеряемый в радианах и находящийся в диапазоне: –263 <= ST(0) <= +263. Команды FSIN и FCOS возвращают результат на место аргумента, а команда FSINCOS возвращает значение синуса на место аргумента и включает значение косинуса в стек.
Команда FPATAN вычисляет arctg (ST(1)/ST(0)). Два операнда извлекаются из стека, а результат включается в стек. Поэтому окончательно, УКАЗАТЕЛЬ СТЕКА УВЕЛИЧИВАЕТСЯ НА 1. Операнды этой команды для сопроцессоров 8087/287 должны удовлетворять условию:
0 < ST(1) < ST(0).
В сопроцессорах 387+ ограничений на диапазон допустимых аргументов команды FPATAN не существует.
Для вычисления остальных обратных тригонометрических функций по аргументу «z» необходимо предварительно подготовить операнды в ST(0) и ST(1) в соответствии с табл. 4 (делить операнды не нужно).
Таблица 4 – Формулы для вычисления обратных тригонометрических функций
 | |||||
 | |||||
 |
 | ||||
 | |||||
 | |||||
Команда FYL2X вычисляет функцию: ST(1) * log2 ST(0). Два операнда извлекаются из стека, а затем результат включается в стек. Поэтому УКАЗАТЕЛЬ СТЕКА УВЕЛИЧИТСЯ НА 1. В команде требуется удовлетворение естественного для логарифмической функции условия:
ST(0) > 0.
Значения других логарифмических функций вычисляются по формулам в табл. 5 с загрузкой в регистр ST(1) необходимых констант командами: FLDLN2 и FLDLG2.
Таблица 5 - Формулы для вычисления логарифмических функций
|
log2 (x) ® FLD1; FLD x; FYL2X; ln (x) = ln (2) * log2 (x) ® FLDLN2; FLD x; FYL2X; lg (x) = lg (2) * log2 (x) ® FLDLG2; FLD x; FYL2X. |
Еще одна логарифмическая команда FYL2XP1 вычисляет функцию: ST(1) * log2 (ST(0) + 1). Причина появления этой команды заключается в получении более высокой точности вычисления функции: log(1 + x). Эта функция часто встречается в финансовых расчетах, а также при вычислении обратных гиперболических функций.
Команда показательной функции F2XM1 вычисляет:
F2XM1 [ST(0)] = 2(ST(0)) – 1.
Аргумент показательной функции должен находится в диапазоне: для сопроцессоров 87/287: 0 <= ST(0) <= 0.5;
для сопроцессоров 387+: –1 <= ST(0) <= +1.
Вычисление функции 2х – 1 вместо функции 2х позволяет избежать потери точности, когда аргумент «х» близок к 0 (а значение функции 2х близко к 1). Остальные показательные функции вычисляются по формулам в табл. 6.
Таблица 6 – Формулы для вычисления показательных функций
|
2x = [2x – 1] + 1 = F2XM1 (x) + 1; ex = 1 + [2(x * log2(e)) – 1] = 1 + F2XM1 (x * log2(e)); 10x = 1 + [2(x * log2(10))– 1] = 1 + F2XM1 (x * log2(10)); аx = 1 + [2(x * log2(а)) – 1] = 1 + F2XM1 (x * log2(a)). |
Таблица 7 – Формулы для вычисления гиперболических функций
|
Cинус гиперболический |
|
|
Косинус гиперболический |
|
|
Тангенс гиперболический |
|
|
Котангенс гиперболический |
|
|
Косеканс гиперболический |
|
|
Секанс гиперболический |
|

Другие рефераты на тему «Программирование, компьютеры и кибернетика»:
Поиск рефератов
Последние рефераты раздела
- Основные этапы объектно-ориентированного проектирования
- Основные структуры языка Java
- Основные принципы разработки графического пользовательского интерфейса
- Основы дискретной математики
- Программное обеспечение системы принятия решений адаптивного робота
- Программное обеспечение
- Проблемы сохранности информации в процессе предпринимательской деятельности