Автоматическая система регулирования температуры
Устройство, обеспечивающее нужный угол открывания тиристоров, называется фазосдвигающим устройством (ФСУ).
Регулировочная характеристика:

Зависимость угла включения тиристоров от управляющего напряжения

Зависимость действующего значения напряж
ения Uн от напряжения управления Up

Зависимость мощности Pн, выделяемой в нагревателе от действующего значения напряжения Uн

Зависимость мощности Pн, выделяемой в нагревателе от угла проводимости тиристоров

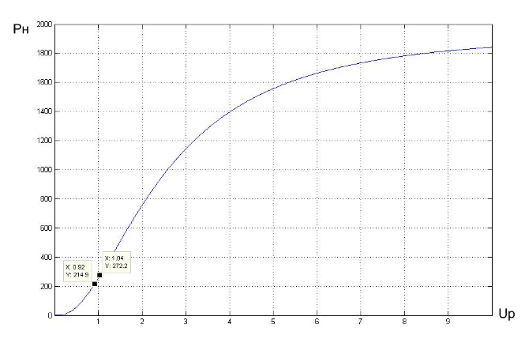
Зависимость мощности Pн, выделяемой в нагревателе от управляющего напряжения Uр

2. ИССЛЕДОВАНИЕ И МОДЕЛИРОВАНИЕ ЛИНЕЙНОЙ АВТОМАТИЧЕСКОЙ СИСТЕМЫ
2.1 Нелинейности автоматической системы, их статические характеристики
2.1.1. F1(u) – нелинейность, отражающая ограничение выходного сигнала регулирующего устройства;

uр – выходной сигнал регулирующего устройства;
uрм – максимальное значение выходного сигнала регулирующего устройства; uрм = 10 В
Статическая характеристика нелинейности имеет вид:

Рис.3.Статическая характеристика нелинейности F1(u)
2.1.2 F2(uр) – нелинейная характеристика фазосдвигающего устройства (ФСУ);

k0 – коэффициент пропорциональности;
Статическая характеристика нелинейности имеет вид:

Рис.4.Статическая характеристика нелинейности F2(u)
2.1.3. F3(α) – зависимость действующего значения выходного напряжения тиристорного регулятора от угла включения тиристоров;

Uc=220B;

Рис.5. Статическая характеристика нелинейности F3(u)
2.1.4. F4(uн) – нелинейная зависимость мощности электротеплового преобразователя (нагревателя) от напряжения;
![]()
Pн – мощность;
Rн – активное сопротивление нагревателя;
C – теплоемкость печи;
γ – коэффициент, моделирующий тепловое сопротивление теплоизоляции;
θ – температура;
θс- температура окружающей среды;

Рис. 6. Статическая характеристика нелинейности F4(u)
2.2 Линеаризация системы в рабочей точке
В нормально функционирующей САУ значение регулируемой и всех промежуточных величин незначительно отличается от требуемых. В пределах малых отклонений все нелинейные зависимости между величинами, входящими уравнение динамики, могут быть приближенно представлены отрезками прямых линий.
Для линеаризации системы воспользуемся общей статической характеристикой всех нелинейностей, а именно зависимостью мощности нагревателя от напряжения управления (нелинейностью типа Ограничение можно пренебречь, так как предполагается работа системы в рабочей точке). С помощью расчетов были установлены значения всех величин в рабочей точке системы, для данной зависимости это будут Pн=275 Дж и Up=1.046 В.
Суть линеаризации состоит в том, чтобы заменить нелинейную характеристику блоков системы прямой линией в окрестностях рабочей точки. Предполагая работу системы при малых отклонениях, можно пренебречь постоянной составляющей и заменить нелинейность линией типа y=k*x.
Т.к. для нашего случаю рабочая точка находится на линейном участке для линеаризации достаточно выбрать две координаты возле рабочей точки и найти уравнение прямой, проходящей через эти две точки. В итоге получаем Pн=476.19*Up.
Изобразим линию в одной системе координат с нелинейной характеристикой:

Таким образом мы заменяем нелинейные блоки системы F2, F3, F4 одним пропорциональным звеном с K=476.19. Таким образом структурная схема системы существенно упростилась:

2.3 Передаточные функции линеаризованной системы
2.3.1 П.ф. разомкнутой системы по выходной переменной относительно сигнала:
![]()
2.3.2. П.ф. замкнутой системы по выходной переменной относительно задающего и возмущающего воздействий:
![]() ;
;
 ;
;
2.4 Характеристическое уравнение системы:
![]()
Характеристический полином:
![]()
![]()
![]() ;
; ![]() ;
; ![]() ;
;
![]() .
.
2.5 Анализ устойчивости линейной модели системы
По передаточной функции замкнутой системы можно судить о том, что система структурно устойчива (т.е. ее нельзя вывести из устойчивости, увеличивая общий коэффициент передачи). Объясняется это тем, что порядок п.ф. получается n=2, следовательно фазовый сдвиг не может превысить 180º без включения звена чистого запаздывания.


(Увеличенный масштаб)
![]() Очевидно, что нет смысла определять устойчивость системы другими методами и искать запасы по амплитуде и фазе.
Очевидно, что нет смысла определять устойчивость системы другими методами и искать запасы по амплитуде и фазе.
2.6 Определение показателя колебательности. Построение области устойчивости системы в плоскости параметров регулирующего устройства (Кр, Тр)
2.6.1 Показатель колебательности
Определяем эту величину Ммакс по формуле
P2+Q2=M2[(1+P)2+Q2], где
P- действительная часть ПФ разомкнутой системы
Q- мнимая часть ПФ разомкнутой системы.
Тогда получаем, что при ω=0 значение АЧХ максимально. Значит получаем М2=104/101=1,0297; тогда М=![]()
Другие рефераты на тему «Программирование, компьютеры и кибернетика»:
Поиск рефератов
Последние рефераты раздела
- Основные этапы объектно-ориентированного проектирования
- Основные структуры языка Java
- Основные принципы разработки графического пользовательского интерфейса
- Основы дискретной математики
- Программное обеспечение системы принятия решений адаптивного робота
- Программное обеспечение
- Проблемы сохранности информации в процессе предпринимательской деятельности