Вторичные измерительные преобразователи и АЦП
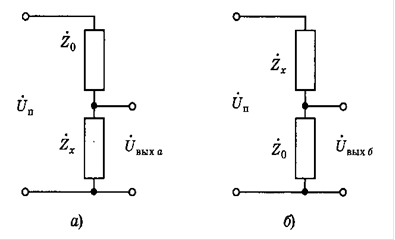
Рис. 2.
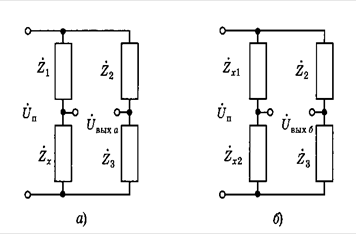
Рис. 3
Нелинейность будет уменьшаться по мере уменьшения Zxпо сравнению с ZQ. Однако при этом будет уменьшаться и чувствительность преобразователей.
На рис.3, а приведена мостовая схема вторичного преобразовате
ля для недифференциальных датчиков, а на рис.3, б - для дифференциальных.
Функции преобразования для этих преобразователей имеют вид.
 (2.5)
(2.5)
Первая из этих характеристик нелинейна, а вторая - если оба компонента дифференциального датчика имеют одинаковые начальные сопротивления и изменяются симметрично, будет линейной.
Емкости и индуктивности могут измеряться мостами только переменного тока. Активные сопротивления могут измеряться мостами как постоянного, так и переменного тока. При этом вариант моста переменного тока не должен отвергаться, как более сложный. Следует иметь в виду, что передача информации на переменном токе более помехоустойчива, чем на постоянном. Поэтому, если датчики удалены от ВИП, что имеет место, например, при контроле напряженных строительных элементов мостов и других сооружений, целесообразно и для резистивных датчиков использовать мосты переменного тока.
Нелинейность вторичных преобразователей имела существенное значение при аналоговой обработке. При цифровых методах она может быть устранена в процессе линеаризации характеристик ИК.
Как видно из формул (2.4) и (2.5), чувствительность делителей и мостов увеличивается с увеличением питающего напряжения. Однако его нельзя увеличивать неограниченно. В силу малых размеров датчиков даже при небольших протекающих токах их нагрев может привести к изменению выходной величины, например сопротивления. Поэтому изменения выходного напряжения делителя или моста могут быть малыми, и потребуется их усиление. При усилении сигналов с делителей обязательно потребуется изменение постоянной составляющей, о возможности чего мы уже говорили. Такая компенсация, хотя и в меньшей степени, может потребоваться и для мостовых преобразователей. Сигналы делителя можно подавать на усилитель по недифференциальной схеме, а выходные сигналы мостовых преобразователей - по дифференциальной схеме. При измерении комплексных сопротивлений мостами переменного тока вторичный преобразователь необходимо дополнить выпрямителями для преобразования переменного напряжения в постоянное. При этом для компенсации фазовых сдвигов, например в дифференциальных индуктивных или емкостных преобразователях, могут потребоваться фазочувствительные детекторы.
Поскольку чувствительность делителей и мостовых схем пропорциональна величине питающего напряжения, его нестабильность непосредственно переносится в мультипликативную погрешность ВИП. Поэтому к стабильности питающего напряжения предъявляются весьма жесткие требования.
При использовании мостов переменного тока в каждый вторичный преобразователь должен входить генератор синусоидального сигнала частотой несколько (иногда несколько десятков) килогерц. При наличии в ИИС нескольких близко расположенных однотипных вторичных преобразователей один генератор может использоваться для питания нескольких мостов. Это упрощает конструкцию, но может привести к увеличению взаимного влияния измерительных каналов.
3. Фазометры и частотомеры
Вторичные преобразователи для параметрических датчиков могут быть генераторного типа, когда датчик включается в цепь обратной связи и величина его выходного сопротивления определяет частоту генерируемого колебания. В этом случае в состав вторичного преобразователя должен входить измеритель частоты.
Во вторичном преобразователе реактивное сопротивление может преобразовываться в сдвиг фазы синусоидального сигнала, который затем измеряется. Например, к измерению фазы сводится вторичное преобразование сигнала сельсина при измерении угла поворота.
Измерения фазы и частоты обычно производятся цифровыми методами. При измерении частоты в режиме частотомера подсчитывается число периодов или полупериодов исследуемого сигнала за заданный интервал времени Т (рис.4, а). При измерении частоты в режиме периодомера подсчитывается число заполняющих импульсов существенно большей частоты за заданное число периодов исследуемого сигнала (рис.4, б). При измерении фазы подсчитывается число импульсов между переходами через нуль с одинаковой производной опорного и преобразованного сигналов и измеряется период, если он заранее не известен (рис.4, в).
Для импульсных датчиков вторичный преобразователь должен обеспечить подсчет числа импульсов. Во всех этих случаях выходной сигнал ВИП, содержащийся в счетчике импульсов, оказывается представленным в цифровой форме, то есть в данном случае вторичный преобразователь выполнят и функции АЦП.
Следует отметить, что объединение вторичных преобразователей с АЦП не устраняет показанной на рис.5 обратной связи ЭВМ с АЦП. Начало счета импульсов и считывание результатов счета производятся по командам с ЭВМ.

Рис. 4.

Рис. 5
4. Специфика вторичных преобразователей для датчиков перемещений
Алгоритмы функционирования вторичных преобразователей при измерении угловых и линейных перемещений могут иметь специфические особенности. Остановимся на двух частных случаях.
Кодовые датчики и сельсины при измерении угла в пределах одного оборота являются статическими, то есть при подаче на них питания они выдают значение углового положения в данный момент времени, независимо от того, были ли изменения положений при нахождении датчика в выключенном состоянии. Однако в статическом режиме невозможно зафиксировать полное угловое перемещение, если оно превышает целый оборот. Это перемещение можно зафиксировать только в динамическом режиме, фиксируя все переходы угла через нуль с учетом направления перехода, что определяет знак приращения в счетчике числа полных оборотов. При этом очевидно, что полные обороты, совершенные при выключенном датчике, не фиксируются.
Аналогичная ситуация наблюдается при вторичной обработке квадратурных сигналов датчиков с периодическими структурами (линейные или угловые индуктосины или растровые фотоэлектрические датчики). На рис.7, а показана зависимость этих сигналов от величины перемещения (на рисунке исключены постоянные составляющие, которые имеются в сигналах растровых датчиков, поскольку их величина не влияет на алгоритмы обработки). Шаг линеек равен ∆х. Амплитуды сигналов предполагаются равными. В противном случае они могут быть скорректированы при обработке.

Рис. 7.
Непосредственно из рисунка видно, что величину полного перемещения можно найти, определив целое число шагов и часть шага, соответствующую моменту отсчета. Если перемещение происходит в одном направлении, число полушагов можно определить, подсчитывая переходы через нуль любого одного сигнала. Однако при этом нельзя определить даже направление перемещения. Изменение направления движения никак не будет фиксироваться. Поэтому, подсчитывая число переходов через нуль, можно определить полный путь, но не координату. Наличие двух сигналов устраняет эту проблему. При движении в положительном направлении последовательность переходов через нуль с учетом знака производной имеет вид +а, +б, - а, - б, +а,…., что соответствует приращению координаты при каждом переходе на четверть шага. При движении в обратном направлении последовательность переходов будет иной: +а, - б, - а, +б, +а,…., и каждый переход через нуль уменьшает координату на четверть шага. Если в процессе движения происходят реверсы, то каждый переход через нуль изменяет координату на четверть шага, а знак этого изменения определяется направлением перемещения. Признаком реверса является последовательное появление в одном из квадратурных сигналов двух одинаковых переходов через нуль. Таким образом, анализируя и соответствующим образом подсчитывая переходы квадратурных сигналов через нуль, можно определить координату с дискретностью в четверть шага линейки датчика.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем