Анализ дискретной системы
Преобразуем разностное уравнение из области отчетов n в область некоторой комплексной переменной z по следующим правилам:
![]() ,
, ![]() ,
, ![]() и т.д.
и т.д.
Тогда получим
y(n)=1*x(n)+1*x(n-1)+1*x(n-2)+1*x(n-3)+0,
5*y(n-1)+0,3*y(n-2)
y(z)=1*x(z)+1*x(z)*z-1+1*x(z)*z-2+1*x(z)z-3+0,5*y(z)*z-1+0,3*y(z)*z-2
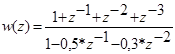
Системная функция W(z) – это отношение выходного и входного сигналов в области z, равная
![]() .
.
Разделим наше выражение на X(Z)
Тогда получим:
w(z)=1+z-1+z-2+z-3+0,5*w(z)*z-1+0,3*w(z)*z-2
отсюда получим конечное выражение
Задание VI. АЧХ и ФЧХ
Найдем амплитудно-частотную и фазово-частотную характеристику системы (АЧХ и ФЧХ).
Для вычисления АЧХ и ФЧХ используем программу MathCad
Зададим коэффициенты системы
а0:=1
а1:=1
а2:=1
а3:=1
b1:=0,5
b2:=0,3
L:=10
ω:=-L,-L+0.05 L
j:=![]()
Передаточная функция системы

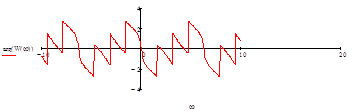
Рисунок 4: АЧX
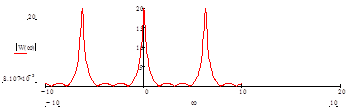
Рисунок 5: ФЧХ
Обратим внимание, что обе частотные характеристики являются периодическими функциями с периодом повторения, равном частоте дискретизации
 ,
,
где Td – это шаг дискретизации сигнала.
Задание VII. Устойчивость системы
Оценим устойчивость системы
Понятие устойчивости системы связано с ее способностью возвращаться в состояние равновесия после исчезновения внешних сил, которые вывели ее из этого состояния.
Естественно, что существует граница устойчивости – это мощность силы, выведшей систему из состояния равновесия.
Для этих целей необходимо вычислить полюса системной функции W(z), т.е. такие значения z, при которых знаменатель системной функции равен нулю. Получим
1-0,5*z-1-0,3*z-2 =0
Умножим правую и левую часть на z2
Z2-0,5*z-0,3=0
Z1;2=![]()
Z1;2=0.85;-0.35
Если хотя бы одно из полученных значений корня ![]() , то система считается неустойчивой Z1=0.85<1
, то система считается неустойчивой Z1=0.85<1
Данная система устойчива.
Вывод
Мы ознакомились с системными функциями линейных систем. Приобрели практические навыки анализа дискретной линейной системы, научились строить графики АЧХ и ФЧХ с помощью программы MathCad.
Подводя общий итог проведенных выше исследований, можно утверждать что наша система неустойчива.
Список литературы
1. Основы цифровой обработки сигналов. Курс лекций / А.И. Солонина, Д.А. Улахович, С.М. Арбузов и др. – СПб.: БХВ-Петербург, 2003. – 608 с.
2. Голышев Н.В., Щетинин Ю.И. Теория и обработка сигналов. Учеб. пособие. – Новосибирск, Изд-во НГТУ, 1998. – Ч.1. – 103 с.
3. Голышев Н.В., Щетинин Ю.И. Теория и обработка сигналов. Учеб. пособие. – Новосибирск, Изд-во НГТУ, 1998. – Ч.2. – 115 с.
4. Сиберт У.М. Цепи, сигналы, системы. – М.: Мир, 1988. – Ч.1. – 336с.
5. Сиберт У.М. Цепи, сигналы, системы. – М.: Мир, 1988. – Ч.2. – 360с.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем