Определение реакции опор твёрдого тела
Найти: Уравнение движения
Решение:
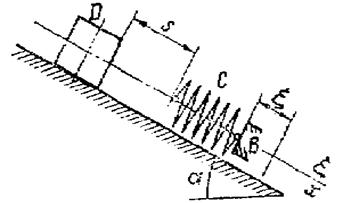
Применим к решению задачи дифференциальное уравнение движения точки. Совместим начало координатной системы с положением покоя груза, соответствующим статической деформации пружины, при условии что точка В занимает свое среднее положение src="images/referats/13430/image088.png">. Направим ось
![]() вниз вдоль наклонной плоскости. Движение груза определяется по следующему дифференциальному уравнению:
вниз вдоль наклонной плоскости. Движение груза определяется по следующему дифференциальному уравнению:
![]() ,
,
где ![]() -сумма проекций на ось
-сумма проекций на ось ![]() сил, действующих на груз.
сил, действующих на груз.
Таким образом
![]()
Здесь ![]() ,
,
где ![]() - статическая деформация пружины под действием груза;
- статическая деформация пружины под действием груза; ![]() -перемещение точки прикрепления нижнего конца пружины, происходящее по закону
-перемещение точки прикрепления нижнего конца пружины, происходящее по закону ![]()
![]() .
.
Статическую деформацию пружины ![]() найдем из уравнения, соответствующего состоянию покоя груза:
найдем из уравнения, соответствующего состоянию покоя груза:
![]()
т.е. ![]()
Откуда ![]()
Дифференциальное уравнение движения груза примет вид:
![]()
или после преобразования
![]()
Разделив все члены уравнения на ![]() получим:
получим:
![]()
Введем обозначения:

Получаем, что ![]()
Имеем неоднородное уравнение
![]() ,
,
где ![]() - общее решение, соответствующего однородного уравнения;
- общее решение, соответствующего однородного уравнения;
![]() - частное решение данного неоднородного уравнения.
- частное решение данного неоднородного уравнения.
Общее решение однородного уравнения имеет вид:
![]()
Частное решение неоднородного уравнения:

Общий интеграл

Для определения постоянных интегрирования найдем, кроме ого, уравнение для ![]() :
:

и используем начальные условия задачи.
Рассматриваемое движение начинается в момент ![]() , когда деформация пружины является статической деформацией под действием груза.
, когда деформация пружины является статической деформацией под действием груза.
Таким образом, при ![]()
![]()
Составим уравнения ![]() и
и ![]() для
для ![]() :
:
Откуда ![]()
Тогда уравнение движения груза примет вид:
![]()
Ответ: ![]()
Применение теоремы об изменении количества движения к исследованию движения механической системы.
Дано:
![]()
![]()
Найти: Скорость ![]() .
.
Решение:
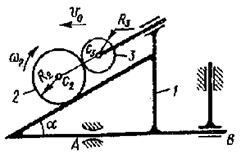
На механическую систему действуют внешние силы: ![]() - сила сухого трения в опоре А;
- сила сухого трения в опоре А; ![]() - силы тяжести тел 1, 2 и 3;
- силы тяжести тел 1, 2 и 3; ![]() -сила нормальной реакции в точке А;
-сила нормальной реакции в точке А; ![]() -реактивный момент в опоре В.
-реактивный момент в опоре В.
Применим теорему об изменении количества движения механической системы в дифференциальной форме. В проекциях на оси координат
 , (1)
, (1)
где ![]() - проекции вектора количества движения системы на оси координат;
- проекции вектора количества движения системы на оси координат; ![]() - суммы проекций внешних сил на соответствующие оси.
- суммы проекций внешних сил на соответствующие оси.
Количество движения системы тел 1, 2 и 3
![]() (2)
(2)
где ![]()
![]() . (3)
. (3)
Здесь ![]() - скорости центров масс тел 1, 2, 3;
- скорости центров масс тел 1, 2, 3; ![]() - соответственно переносные и относительные скорости центров масс.
- соответственно переносные и относительные скорости центров масс.
Очевидно, что
 (4)
(4)
Проецируя обе части векторного равенства (2) на координатные оси, получаем с учетом (3) и (4)
![]() (5)
(5)
где ![]() - проекция вектора
- проекция вектора ![]() на ось
на ось ![]() ;
;
![]()
Проекция главного вектора внешних сил на координатные оси
![]() (6)
(6)
Знак « - » соответствует случаю, когда ![]() , а знак «+» - случаю, когда
, а знак «+» - случаю, когда ![]() .
.
Другие рефераты на тему «Физика и энергетика»:
Поиск рефератов
Последние рефераты раздела
- Автоматизированные поверочные установки для расходомеров и счетчиков жидкостей
- Энергосберегающая технология применения уранина в котельных
- Проливная установка заводской метрологической лаборатории
- Источники радиации
- Исследование особенностей граничного трения ротационным вискозиметром
- Исследование вольт-фарадных характеристик многослойных структур на кремниевой подложке
- Емкость резкого p-n перехода