Создание упрощенной математической модели движения судна, управляемого рулем и винтом
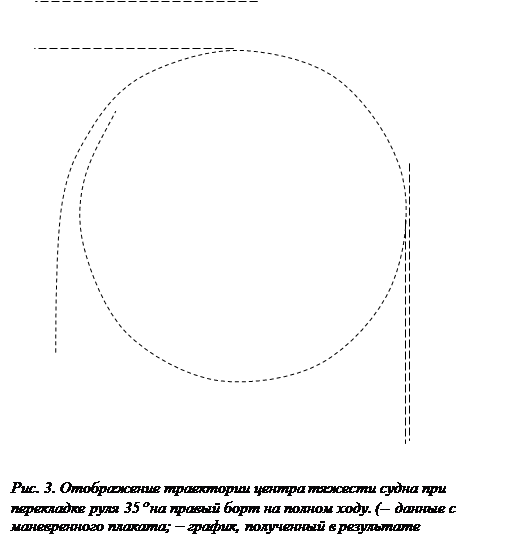
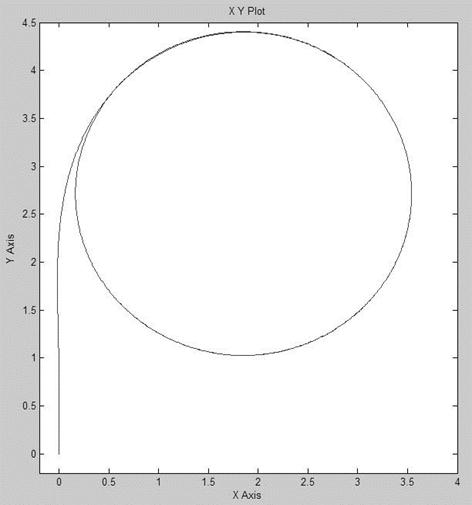
Проверка достоверности ММДС, предложенной автором, была выполнена во время прохождения практики на самовыгружающемся балкере «CSL Spirit». В результате расчета и подстановки в модель коэффициентов для вышеуказанного судна (L = 225 m, B = 32.2 m, T = 8.8 m) получена траектория движения центра тяжести при выполнении маневра «циркуляция» (угол перекладки руля - 35° на правый борт, начальная скорос
ть – 15.8 узлов), приведенная на рис. 3 (координаты даны в кабельтовых).

Выводы и перспектива дальнейшей работы по данному направлению:
· В качестве исходной математической модели была принята система (1).
· При воплощении ММДС на ЭВМ была выбрана система математического моделирования Matlab Simulink 6.5.0.1.
· Для решения данной системы, благодаря своей простоте и высокой точности, были выбраны численные методы интегрирования, в основе которых лежит метод Рунге-Кутта.
· Упрощения математической модели на первом этапе создания, можно добиться, вводя следующие условия: судно движется на глубокой тихой воде, в безветренную погоду, крен и дифферент не учитываются.
· Приведенная структура уравнений с переменными коэффициентами, по сравнению с более упрощенными моделями с постоянными коэффициентами [1, 3, 5], удобна тем, что в нее легко добавлять новые компоненты и удалять ненужные. Это позволяет приспосабливать модель к требуемым расчетам.
· Разработанная ММС позволяет при задании различных управляющих воздействий рассчитывать траекторию движения судов заданного типа.
Литература
1. Справочник по теории корабля. Т. 3. /Под ред. Я.И. Войткунского. – Л.: Судостроение, 1984 – 542 с.
2. Управление судном. Учеб. Для вузов /Демин С.И. и др. – М.: Транспорт, 1991. – 359 с.
3. Ю. А. Лукомский, В. Г. Пешехонов, Д. А. Скороходов Навигация и управление движением судов. Учебник. – СПб.: «Элмор», 2002. – 360 с.
4. Вагущенко Л.Л., Цымбал Н. Н. Системы автоматического управления движением судна. 2-е изд., перераб. и доп.– Одесса: Латстар, 2002 – 310 с.
5. Гофман А. Д. Движительно-рулевой комплекс и маневрирование судна. Справочник –Л.: Судостроение, 1988. – 360 с.
6. Теория и устройство судов. Учебник/Ф. М. Кацман, Д. В. Дорогостайский, А.В. Конов, Б. П. Коваленко. – Л.: Судостроение, 1991. – 416 с.
7. Дьяконов В.П. Справочник по алгоритмам и программам на языке бейсик для персональных ЭВМ – М.: Наука, 1989. – 240 с.
8. Дьяконов В. П. Компьютерная математика. Теория и практика– М.: «Нолидж», 2001. – 1296 с.
9. Testing and Extrapolation Methods/Maneuverability/Validation of Maneuvering Simulation Models. International Towing Tank Conference, 2002. – 11 p.
10. W. Naeem, R. Sutton, SM Ahmad Pure pursuit guidance and model predictive control of an autonomous underwater vehicle for cable/pipeline tracking. / Journal of Marine Science and Environment №. C1 2004, p. 25 – 35.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск