Автоматизация транспортировки колесных пар в демонтажное отделение
Уточенное значение силы трения в уплотнении поршня определится
![]()
Уточенное значение силы инерции при прямом ходе
![]()
Уточненное значение суммарных сил составит
![]()
Условие равновесия по
ршня в рабочем цилиндре ![]() Следовательно, пневмопривод одностороннего действия с рассчитанными параметрами работоспособен.
Следовательно, пневмопривод одностороннего действия с рассчитанными параметрами работоспособен.
Далее определяем диаметр штока
![]()
Проверяем шток на продольную устойчивость (Ркр>Рн)
![]()
Где Е- модуль упругости материала штока, ![]()
lшт-длина штока (![]() )
)
![]()
Так как 19347>16526 следовательно условие на продольную прочность выполняется.
3. Выбор системы управления и составление структурной схему автоматического управления
Чтобы автоматизировать технологий процесс подачи колесной пары на демонтаж, необходимо решить вопрос выбора управления отдельными операциями процесса такими как: поперечным движением тележки, подъемом и опусканием колесной пары установленной на тележке, а также управление отсекателем колесных пар.
Согласно задания, необходимо определить смешанную систему автоматического управления. В этих системах применяются конечные электрические выключатели и электромагнитные вентили.
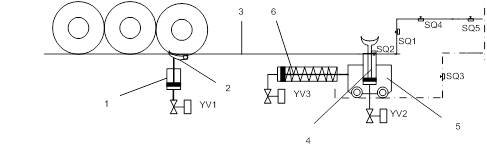
Для выбранной путевой системы управления на механической схеме 3.1 производим расстановку условно обозначенных электрических выключателей.
Схема 3.1 Для подачи колесной пары на демонтаж
Для составления структурной схемы автоматического управления рассмотрим детальную последовательность выполнения технологического процесса.
В начале осуществляется пуск системы, при этом срабатывает электромагнитный вентиль YV1. Шток поршня 1 поднимает отсекатель 2. Колесная пара движется вдоль пути 3, и в конце движения нажимает на конечный выключатель SQ1. Который отключает электрический вентиль YV1 и включает электрический вентиль YV2. Колесная пара поднимается штоком цилиндра 4, в верхнее положение, при этом замкнув конечный выключатель SQ2. Срабатывает электрический вентиль YV3. Телжка 5 под дествием штока поршня 6 начинает двигаться вместе с колесной парой. Дойдя до упора тележка включит конечный выключатель SQ3. Он отключит электрический вентиль YV2. Шток поршня 3 опустится в нижнее положение, а колесная пара опустившись, нажмет на конечный выключатель SQ4, который отключит электрический вентиль YV3, и тележка 5 под действием возвратной силы пружины поршня 6 вернется в обратное положение. После того как закнчивается демонтаж букс, колесная пара двинется дальше нажав на конечный выключатель SQ5, который включает электрический вентиль YV1, и процесс повторяется вновь.
На основе детальной последовательности строим структурную схему процесса, которая в значительной степени облегчает построение принципиальной электрической схемы управления.
Прямоугольники на структурной схеме обозначают элементы автоматики. Сплошные стрелки показывают контактное воздействие одного элемента автоматики на другой. Стрелки, направленные на вход элемента, обозначают замыкающие контакты, а на выход элемента—замыкающие контакты. Пунктирные стрелки обозначают условную передачу управления от одного элемента автоматики к другому.
Структурная схема управления механизма подачи колесных пар на демонтаж.
![]()
Рис.2 S- кнопка пуск; YV1+YV3—электрические вентили; SQ1+SQ5—конечные выключатели;
4. Составление и описание принципиальной электрической схемы автоматического управления
Руководствуясь правилами построения электросхем, условными графическими изображениями элементов и структурной схемой, разрабатываем принципиальную схему автоматического управления.
Приступим к составлению цепи управления. Руководствуясь структуронй схемой 3.1 составим цепь управления
Принципиальная схема автоматического управления электромагнитным вентилем YV1, Так как электромагнитный вентиль не имеет контактов, то параллельно с катушкой вентиля подключаем катушку промежуточного реле К1. Замыкающими контактами в цепи управления электромагнитным вентилем YV1 являются кнопка пуск S2 , контакт реле времени К1.1 и конечный электрический выключатель SQ5. Их располагаем параллельно. Размыкающим контактом в этой цепи служит нормально замкнутый контакт конечного электрического выключателя SQ1(на структурной схеме конечный выключатель воздействует выключает YV1 и включает YV2). Цепь управления вентилем считается законченной после постановки блокировочного контакта К1.1 промежуточного реле К1 параллельно замыкающим контактам. Аналогично составили остальные цепи управления.

По составленной электрической схеме и механической конструкции подачи коленных пар на демонтаж производим технологическое описание автоматизированного процесса.
Первоначальный пуск системы производит рабочий, работающий на этом участке. Для пуска нажимается кнопка S2. При этом замыкается цепь и получает питание катушка промежуточного реле К1 и катушка электромагнитного вентиля YV1. Замыкание в контактах К1.1 обеспечивает самопитание К1 и YV1. Электромагнитный вентиль срабатывает и сообщает пневмоцилиндр подъема отсекателя. После подъема отсекателя колесная пара покатится и в конце упрется в стенку нажав конечный выключатель SQ1 который разомкнет цепь с электромагнитным вентилем YV1, и замкнет цепь питания электромагнитным вентилем YV2 и получает питание катушка К2. YV2 срабатывает и сообщает цилиндр подъема колесных пар с нагнетательной магистралью. Шток вместе колесной парой поднявшись в верхнее положение, где сработает конечный выключатель SQ2, который включит катушку К3 и электромагнитный вентиль YV3, который сработав соединит пневмоцилиндр горизонтального перемещения тележки с нагнетательной магистралью. Колесная пара перемещается вместе с тележкой, в конце движения тележка своим бортом нажмет на конечный выключатель SQ3, который отключит питание электромагнитного вентиля YV2 и катушки К2, колесная пара опускается на путь нажав на конечный выключатель SQ4, в результате отключив питание электромагнитного вентиля YV3 и катушки К3, тележка по действием возвратной пружины в поршне вернется в обратное положение. После демонтажа колесная пара двинется дальше нажав на конечный выключатель SQ5 , который включит цепь с катушкой промежуточного реле К1 и катушку электромагнитного вентиля YV1 процесс повторится в новь.
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды