Анализ системы автоматического регулирования разрежения в топке
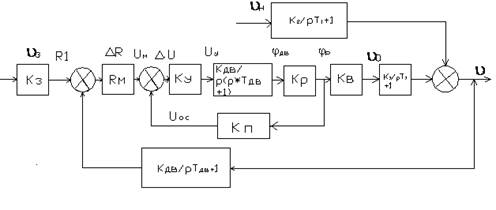
2. Составление структурной схемы
1) Для составления структурной схемы получим передаточные функции всех элементов системы.
Уравнение объекта управления:
Т1* (dPт/dt) + Рт=к1*Qд - к2Qв;
где Рт, Па - разрежение в топке;
Qд, м3/с - производительность дымососа;
Qв, м3/с - расход воздуха в топку;
Изображение Лапласа.
Т 1*Р* Рт (р) + Рт (р) = к1 * Qд (р) - к2 *
Qв (р);
Так как к звену приложено несколько воздействий, то составляем передаточные функции отдельно по каждому воздействию.
При этом остальные воздействия полагают равным нулю. Согласно принципу суперпозиции изменение выходной величины такого звена равно сумме изменений выходных величин по каждому воздействию.
В нашем случае передаточная функция топки котла по управляющему воздействию Qд.
Wy (р) = Рт (р) / Qд (р) = к1/ (Т1*Р + 1);
Рт (р) * (Т1*Р + 1) = к1 * Qд (р);
Wf (р) = Рт (р) / Qв (р) = - (к2/ (Т1*Р + 1)) –
передаточная функция по возмущающему воздействию Qв.
Аналогичным образом получили передаточные функции остальных элементов системы.
2) Датчик: дифтягометр с автотрансформатором Д:
Тд (dUM/dt) + UM = кд Рт;
Тд *Р*UM (р) + UM (р) = кд * Рт (р);
UM (р) (Тд * Р + 1) = кд * Рт (р);
Wд = UM (р) / Рт (р) = кд/ (Тд * Р + 1);
где UM, В - амплитуда выходного напряжения преобразуется.
3) Задатчик (3):
U3 = к3 * Рт3;
U3 (р) = к3 * Рт3 (р);
W3 (р) = V3 (р) / Рт3 (р) = к3;
Рт3, Па - задающее значение разрежения.
4) Дифференциальный усилитель:
Uy = ку (Uз - Uос - Uд);
ДУ состоит из двух звеньев. Первое звено осуществляет вычитание напряжений Uос и Uд из напряжения Uз.
ΔU = (Uз - Uд - Uос);
Второе звено усиливает разность ΔU.
Uy = ку * ΔU;
Uy (р) = ку * ΔU (р);
Wy (р) = Uy (р) / ΔU (р) = ку;
5) Устройство местной обряжной связи УОС.
Uос = к * n * φдв;
φдв град. - угол поворота выходного вала двигателя.
Uос (р) = к * n * φдв (р);
Wn (р) = Uос (р) / φдв (р) = кn;
В устройство УОС входит дифференциальный трансформатор с преобразователем угла поворота.
6) Двигатель постоянного тока с якорным управлением.
Тдв * (d2 φдв/ dt2) + (d2 φдв/ dt) = кдв * Uy;
Тдв * р2 * φдв (р) + р * φдв (р) = кдв * Uy (р);
Wy (р) = φдв (р) / Uy (р) = кдв/ р * (Тдв * Р + 1);
где Uy, В - напряжение управления.
φдв град. - угол поворота выходного вала двигателя.
7) Регулирующий орган дымососа (3) - заслонки.
Qд = кв * φр;
Qд (р) = кв * φр (р);
φр - угол порота дроссельных заслонок
Qд, м3/с - производительность дымососа.
8) Редуктор (р).
φр = кр * φдв;
φр (р) = кр * φдв (р);
Wр = φр (р) / φдв (р) = кр;
где φр, φдв - входной и выходной углы поворота.
Задатчик (з) системы является безинерциальным. Его коэффициент передачи должен быть равен коэффициенту передачи кд датчика. Поскольку заданное Рз и Рд - действительные разряжения должны вычитаться в одном масштабе. Поэтому кд = кз можно перенести за систему управления СУ и
считать, что из данного разрежения Рт непосредственно вычитают Рд и формируют сигнал ошибки "е". Преобразованная таким образом структурная схема САР разряжения в топке котла показана на рис.4.
3. Определение закона регулирования системы
Для определения закона регулирования рассматриваемой системы автоматического регулирования разрежения в топке котла найдем передаточную функцию, определяющую взаимосвязь Qв на объект и ошибки "е":
![]()

Подставим в найденное выражение численное значение коэффициентов и получим:

При последовательном соединении звеньев их передаточные функции перемножаются, поэтому:
![]()
Окончательно для безинерциального регулятора получаем:
![]()
Зависимость управляющего воздействия Qв от ошибки "е" показывает, что в рассматриваемой системе применён пропорциональный закон регулирования.
4. Определение передаточных функций системы по управляющему воздействиям и для ошибок по этим воздействиям
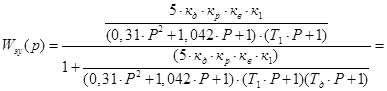
Передаточная функция системы автоматического регулирования по управляющему воздействию.
![]() ;
;
 ;
;
= =
=
=![]() ;
;
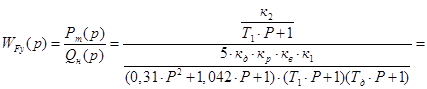
Передаточная функция САР по возмущающему воздействию определяет взаимосвязь между изменением регулируемой величиной Рт и применением возмущающего воздействия Qн:
![]() ;
;
![]() ;
;
где WF (р) - передаточная функция цепи звеньев от места приложения возмущающего воздействия до регулируемой величины.
=![]() ;
;
![]() ;
;
Передаточная функция САР для ошибки по возмущающему воздействию, определяет взаимосвязь между изменением сигнала ошибки ез и применением задающего воздействия РТз.

=![]() ;
;
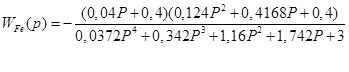
Подставим в полученное выражение численные значения параметров, и после промежуточных преобразований, получаем:
![]() ;
;
Передаточная функция САР по возмущающему воздействию, определяем взаимосвязь между применением ошибки и применением возмущающего воздействия.
![]() ;
;
 ;
;
5. Анализ устойчивости системы. Определение устойчивости запасов
5.1 Анализ устойчивости по критерию Гурвица
Передаточная функция линейной системы автоматического регулирования в общем случае имеет вид:
![]() ;
;
где m![]() n, Q (p) =0 - характеристическое уравнение системы.
n, Q (p) =0 - характеристическое уравнение системы.
![]() ;
;
Другие рефераты на тему «Производство и технологии»:
- Кристаллизация сталей и твердофазные превращения в сталях. Выделение аустенита, феррита, цементита, перлитное превращение
- Автоматизация производства
- Классификация, маркировка, области применения углеродистых сталей
- Воздухообмен в шахте
- Общая характеристика, свойства и производители осмотических мембран
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды