Синхронный двигатель
Шаговые двигатели можно подразделить на три основные конструктивные группы: с постоянными магнитами (активный ротор), реактивные и индукторные.
Шаговые двигатели могут иметь различное число фаз, но наибольшее распространение получили двух-, трех- и четырехфазные ШД. Обмотка фазы статора либо целиком является обмоткой управления, либо ее разделяют на две (выводом от средней точки), магнитные
оси которых сдвинуты в пространстве на 1800.
Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или разнополярных импульсов.
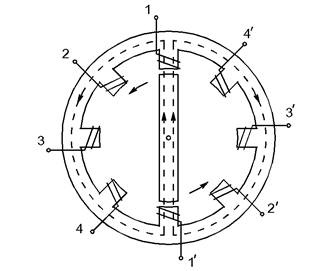
Принцип действия ШД рассмотрим на примере конструкции, представленной на рис. 3.10. Статор имеет явновыраженные полюса (зубцы), на которых расположены обмотки управления. В рассматриваемом примере ШД имеет 4 фазы. Каждая фаза состоит из двух обмоток, расположенных на противоположных полюсах. Начало обмоток обозначено цифрами 1, 2, 3, 4. Конец обмоток – цифрами 1¢, 2¢, 3¢, 4¢.
Ротор явнополюсный, и может быть как намагниченным (активного типа), так и намагниченным (как у индукторных СД). Рассмотрим сначала не намагниченный ротор.
При подаче импульса тока на обмотку 1–1¢ ротор за счет реактивного момента встанет напротив соответствующих зубцов (полюсов) статора. Если затем подать импульс на обмотку 2–2¢, то ротор повернется против часовой стрелки на угол 450 и встанет напротив соответствующих зубцов. Если подавать импульсы на обмотки в последовательности 1–2–3–4, то ротор будет вращаться против часовой стрелки. Для вращения по часовой стрелке последовательность подключения фаз должна быть 1–4–3–2. При пассивном роторе импульсы управления могут быть однополярными. Если подать импульсы управления на две соседние фазы одновременно (например, 1 и 2), то ротор займет промежуточное положение между зубцами 1 и 2. Это явление называется электрическим дроблением шага.
 |
|
Если используется ротор активного типа, то импульсы управления должны быть разнополярными. В рассматриваемом примере для вращения против часовой стрелки подаются положительные импульсы в последовательности 1–2–3–4 (поворот на первые 1800), а затем отрицательные в последовательности 1–2–3–4 (вторые 1800). При вращении по часовой стрелке последовательность 1–4–3–2–1–4–3–2 (поворот на 3600). Цифра с чертой означает, что на данную фазу подается отрицательный импульс. Управление разнополярными импульсами усложняет схему управления двигателем, поэтому в ШД чаще используется пассивный ротор.
В реактивных ШД ротор так же как и статор имеет зубчатую конструкцию. На рис. 3.11 статор имеет 12 зубцов, а ротор – 16 зубцов. Обмотки 1–4–7–10 соединены последовательно и составляют одну фазу (Ф1). Аналогично обмотки 2–5–8–11 и 3–6–9–12 составляют фазы Ф2 и Ф3. Таким образом имеется всего 3 фазы.
При подаче импульса на фазу Ф1 магнитный поток замыкается, как показано на рис. 3.11. Напротив зубцов статора 1–4–7–10 стоят зубцы ротора 1¢-5¢-9¢-13¢. Если следующий импульс подать на фазу Ф2 (2–5–8–11), то магнитный поток должен найти другой путь. Наименьший зазор оказывается между зубцами 2–5–8–11 статора и зубцами 2¢-6¢-10¢-14¢ ротора соответственно. Появится реактивный момент, который повернет ротор так, что указанные зубцы ротора и статора окажутся напротив друг друга. Угол поворота ротора составит 300-22,50=7,50. При подаче импульса на Ф3 ротор повернется еще на 7,50 и т.д. Подавая импульсы тока в последовательности 1–2–3–1, мы получим вращение ротора шагами по часовой стрелке. Для вращения ротора против часовой стрелки импульсы нужно подавать на фазы в последовательности 1–3–2–1.
Угол поворота на один шаг определяется числом фаз Nф и числом зубцов ротора Nр:
![]() . (3.3)
. (3.3)

Существует много конструктивных разновидностей ШД. Если статор и ротор развернуть в линию, то получится линейный ШД (рис. 3.12). Очевидно, что в этом случае линейное перемещение ротора будет ограничено его длиной.
|
Режим работы ШД в значительной мере определяется частотой следования управляющих импульсов f.
|
Статический режим (f=0) соответствует прохождению постоянного тока по обмоткам управления, создающим неподвижное магнитное поле. Основной характеристикой этого режима является зависимость статического синхронизирующего момента Mс от угла рассогласования q между продольной осью ротора и м.д.с. статора (моментная характеристика). На рис. 3.14 показаны положения ротора для различных значений q. При q=0 синхронизирующий момент Mс=0. При q¹0 реактивный синхронизирующий момент Mс¹0. Он стремится повернуть ротор в согласованное положение. Если угол рассогласования равен половине угла между зубцами ротора ![]() q=
q=![]() qр, то на каждый зубец действуют равные по величине и противоположные по направлению силы. Результирующий момент Mс=0. Таким образом в диапазоне изменения q от 0 до
qр, то на каждый зубец действуют равные по величине и противоположные по направлению силы. Результирующий момент Mс=0. Таким образом в диапазоне изменения q от 0 до ![]() qр синхронизирующий момент имеет максимум. Зависимость Mс=f(q) показана
qр синхронизирующий момент имеет максимум. Зависимость Mс=f(q) показана
Под действием момента нагрузки на валу ШД ротор отклонится от согласованного положения на угол dq. Если Mн превысит Mмакс, то будет потеряна синхронизация между положением ротора и управляющими импульсами. Поэтому для нормальной работы ШД всегда должно выполняться условие Mн< Mмакс.
Другие рефераты на тему «Физика и энергетика»:
Поиск рефератов
Последние рефераты раздела
- Автоматизированные поверочные установки для расходомеров и счетчиков жидкостей
- Энергосберегающая технология применения уранина в котельных
- Проливная установка заводской метрологической лаборатории
- Источники радиации
- Исследование особенностей граничного трения ротационным вискозиметром
- Исследование вольт-фарадных характеристик многослойных структур на кремниевой подложке
- Емкость резкого p-n перехода