Управляемость автомобиля. Параметры маневра
Обычно боковые реакции дороги на колесах возникают вследствие действия на автомобиль центробежной силы, которая пропорциональна квадрату скорости движения на повороте. Поэтому скоростной стабилизирующий момент изменяется пропорционально квадрату скорости движения.
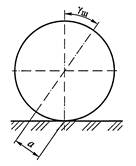
Рисунок 2.3 Продольный наклон оси поворот
а управляемого колеса
У автомобилей угол продольного наклона оси поворота управляемых колес уш = 0 .3,5°. При увеличении угла уш повышается стабилизация управляемых колес, но усложняется работа водителя.
Скоростной стабилизирующий момент
![]() (10)
(10)
где а — плечо действия реакции дороги Ry, rк — радиус колеса; γш — угол продольного наклона шкворня.
Упругий стабилизирующий момент шины создается при повороте управляемого колеса вследствие смещения результирующей боковых сил, действующих в месте контакта шины с дорогой, относительно центра контактной площадки (рисунок 2.4).
Упругий стабилизирующий момент, создаваемый шиной:
![]() (11)
(11)
где Рб — результирующая боковых сил; b — плечо действия силы Рб.

Рисунок 2.4 Схема возникновения упругого стабилизирующего момента шины
Стабилизирующий момент шины достигает значительной величины у легковых автомобилей, которые имеют высокоэластичные шины и движутся с большой скоростью. Он может составлять 200 .250Н·м при углах увода колес 4 .5°. Поэтому при очень эластичных шинах угол продольного наклона шкворня делают равным нулю, чтобы не усложнять управление автомобилем. Однако при небольшой скорости движения стабилизирующий момент шины не обеспечивает надежной стабилизации управляемых колес. Кроме того, упругий стабилизирующий момент шины резко уменьшается на дорогах с небольшим коэффициентом сцепления (скользких, обледенелых).
Стабилизация управляемых колес неразрывно связана с установкой управляемых колес автомобиля[1].
2.3 Колебания управляемых колес
В процессе движения управляемые колеса автомобиля могут совершать колебания вокруг шкворней (осей поворота) в горизонтальной плоскости. Такие колебания вызывают износ шин и рулевого привода, повышают сопротивление движению и увеличивают расход топлива. Они могут привести к потере управляемости автомобиля и снижению безопасности движения. Причинами, вызывающими эти колебания, являются гироскопическая связь управляемых колес, их неуравновешенность (дисбаланс) и двойная связь колес с несущей системой (рама, кузов) через рулевой привод и подвеску.
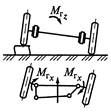
Рисунок 2.5 Схема возникновения самовозбуждающихся колебаний (автоколебаний) управляемых колес при зависимой подвеске
При наездах одного из колес на дорожные неровности при зависимой их подвеске (рисунок 2.5) происходит перекос переднего моста. Управляемые колеса наклоняются, и изменяется положение их оси вращения. Это приводит к возникновению гироскопического момента мrx, который действует в горизонтальной плоскости и поворачивает управляемые колеса вокруг шкворней[3].
Поворот колес вокруг шкворней вызывает возникновение другого гироскопического момента мrz, который действует в вертикальной плоскости и стремится увеличить перекос моста и наклон колес.
Таким образом, перекос моста обусловливает колебания управляемых колес вокруг шкворней, а они, в свою очередь, увеличивают перекос моста, т.е. обе колебательные системы связаны между собой и влияют друг на друга.
Возникающие в этом случае колебания управляемых колес вокруг шкворней непрерывно повторяются (самовозбуждаются), являются устойчивыми и наиболее опасными.
При вращении неуравновешенного колеса (рисунок 2.6) возникает центробежная сила рц. Ее вертикальная составляющая Рz стремится переместить колесо в вертикальном направлении и наклонить его, что вызывает появление гироскопического момента мх. Горизонтальная составляющая рх центробежной силы стремится повернуть колесо вокруг шкворня. Колебания управляемых колес становятся особенно значительными, когда не уравновешены оба колеса и неуравновешенные части располагаются с разных сторон осей вращения, так как в этом случае поворачивающие моменты мх складываются. Колебания также возрастают при увеличении скорости движения автомобиля в связи с тем, что значения составляющих рz и рх центробежной силы рц во многом зависят от скорости[1].
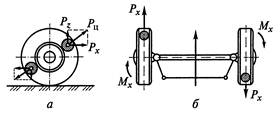
Рисунок 2.6. Дисбаланс управляемых колес:
а — силы, действующие на неуравновешенные колеса; б — схема возникновения поворачивающего момента
Управляемые колеса автомобиля имеют двойную связь с его несущей системой, которая осуществляется через подвеску и рулевой привод.
При вертикальных перемещениях колеса (рисунок 2.7) шарнир А, соединяющий продольную рулевую тягу с рычагом поворотного кулака, должен перемещаться по дуге бб с центром в точке О1, что обусловлено кинематикой рулевого привода.

Рисунок 2.7. Связь управляемых колес с несущей системой автомобиля:
А — шарнир; О,О1 — центры колебаний; аа, бб — траектории перемещения шарнира
Кроме того, шарнир А также должен перемещаться по дуге аа с центром в точке О, что связано с особенностями кинематики подвески. Однако дуги аа и бб расходятся, поэтому вертикальные перемещения управляемых колес сопровождаются их поворотом вокруг шкворней.
Колебания управляемых колес вокруг шкворней совершаются с высокой и низкой частотой.
Колебания высокой частоты, превышающей 10Гц, с амплитудой не более 1,5 .2° происходят в пределах упругости шин и рулевого привода. Эти колебания не передаются водителю и не приводят к нарушению управляемости автомобиля, так как поглощаются в рулевом управлении. Однако высокочастотные колебания вызывают дополнительный износ шин и деталей рулевого привода, повышают сопротивление движению автомобиля и увеличивают расход топлива.
Колебания низкой частоты (менее 1Гц) с амплитудой 2 .3" нарушают управляемость автомобиля и безопасность движения. Для их устранения необходимо снизить скорость автомобиля.
Полностью устранить колебания управляемых колес вокруг шкворней невозможно — их можно только уменьшить. Это обеспечивается применением независимой подвески управляемых колес, что ослабляет гироскопическую связь между ними, применением балансировки колес, благодаря чему устраняется их неуравновешенность, уменьшением влияния двойной связи колес с несущей системой, что достигается принятием различных конструктивных мер[4].
2.4 Увод колес автомобиля
Уводом колеса называется его свойство катиться под углом к плоскости своего вращения вследствие действия боковой силы.
Эластичное колесо (рисунок 2.8) при отсутствии боковой силы катится в плоскости своего вращения, а при действии боковой силы — под некоторым углом.
Другие рефераты на тему «Транспорт»:
- Организация и ТО дорожно-строительных машин и систем массового обслуживания
- Расчет производственной программы по техническому обслуживанию автомобилей Hyundai
- Технологический расчет участка дизельной топливной аппаратуры для АТП, состоящего из 50 автомобилей КамАЗ-53215 с фактическим пробегом с начала эксплуатации 165 тыс. км
- Перевозка пассажиров
- Устройство ВАЗ-2108, -2109
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск