Страница
7
Аналогично может быть представлен и объем передаваемого сигнала, т.е.
![]()
где: Тс - длительность импульса сигнала; Fс - ширина спектра частот сигнала; Hс=logPс/Pn – превышение уровня сигнала рс над уровнем помех рп
Нормальная передача сигналов возможна только при правильном согласовании Vс и Vк. Это означает, что всегда
должно выполняться не только условие Vс ≤ Vк, но и Тс ≤ Тк, Fс ≤ Fк, Нс ≤ Hк.
Таким образом, согласование сигнала с каналом сводится к уменьшению одного параметра (Т, F, Н) и пропорциональному увеличению другого с сохранением общего объема Vс ≤ Vк. Подобные преобразования проводятся при выборе способа передачи сигналов по данному каналу. Однако кодирование может изменять исходный объем сигналов, подлежащих передаче. Вместе с этим изменяются эффективность и помехоустойчивость передачи.
Следует подчеркнуть, что Vк характеризует максимальное количество информации, которое можно передать по каналу за время Тк, при заданных ограничениях мощности передаваемого сигнала. По определению К.Э. Шеннона, максимальная скорость передачи информации при рс ” рп
 |
Использование канала для передачи максимального объема информации с требуемой достоверностью –основная задача при создании любой системы телемеханики. Имеются различные подходы для достижения максимального использования возможностей канала по Fк и Тк при постоянном Hк.
Частотное разделение сигналов. Всю полосу частот канала Fк разбивают на число имеющихся двоичных сигналов и с тем, чтобы каждый из них независимо от других передавался на своей частоте (рис. 18, а). Подобный способ технически легко осуществить только при сравнительно малом числе сигналов, так как различать близкие частоты сложно.
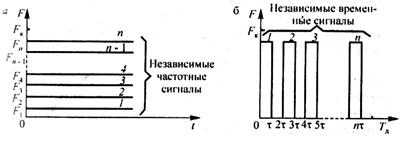
Рис. 18. Частотные и временные разделения сигналов
Если имеются ограничения на допустимое время передачи сигналов Tд, то минимальная полоса частот, необходимая для передачи сигнала такой длительности, определяется из соотношения Fc=1/Tд. Максимально возможное число частотных сигналов n =Fk /Fc.
Подобным образом могут быть организованы частотные каналы для независимой передачи непрерывных сигналов. Число таких каналов для аналоговых сигналов будет значительно меньше, чем для дискретных, так как каждый из них будет занимать большую полосу частот.
Временное разделение сигналов. Полностью использовать полосу частот канала связи можно также при передаче сигнальных импульсов длительностью τ=1/Fk . Такие импульсы должны передаваться последовательно во времени, так как каждый из них требует использования всей полосы частот (рис. 18,б). Для правильного приема импульсов между ними должны быть разделительные паузы. Длительность такой паузы не может быть меньше длительнос-
ти импульса. Отсюда за время может быть передано п независимых сигналов:
![]()
Кроме рассмотренных двух предельных случаев максимального использования объема канала при частотном и временном его разделении, может быть организована передача частотно-временных сигналов при условии, что их общий объем не превышает объема канала.
Любой реальный сигнал, передаваемый по каналу связи, изменяется во времени по амплитуде Aс(Hс) и частотным составляющим Рс, т.е. его объем
Проекции объема сигнала на плоскости позволяют судить об изменениях амплитуды (рис.19, а), частоты (рис. 19, б) во времени, амплитуды частотных составляющих (спектральной ха
характеристики) сигнала (рис. 19, в). Рассмотренные проекции, представляющие собой один и тот же сигнал, взаимосвязаны и поэтому по определенным правилам из одной проекции можно получить другую.
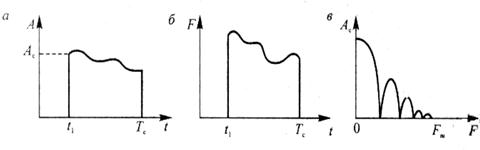
Рис. 19. Проекции объема сигнала на плоскости
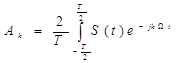
Наиболее широко в теории сигналов используются взаимные преобразования двух проекций: получение спектральной характеристики из известной зависимости амплитуды сигнала во времени и получение закона изменения формы сигнала во времени из известной спектральной характеристики.
Правила выражения одной характеристики сигнала через другую получены на основе преобразований Фурье и называются соответственно прямым (3) и обратным (4) преобразованиями Фурье:

Сигналы, передаваемые по каналу, могут быть представлены как одиночными импульсами, так и последовательностями импульсов с постоянным и переменным периодами следования.
Последовательности импульсов имеют следующие параметры (рис. 20): амплитуду Ат, длительность (ширину) импульсов τи тактовую частоту следования F = 1/T (круговую частоту, )положение (фазу) импульсов относительно тактовых точек tі= iТ, где i = 0, ± 1,±2, .
![]()

Рис.20. Характеристика последовательностей импульсов
![]() Отношение периода следования импульсов к длительности называется скважностью
Отношение периода следования импульсов к длительности называется скважностью
Эта величинатакже является характеристикой последовательности импульсов.
Если в канале связи передаются импульсы постоянного тока, их называют видеоимпульсами (рис. 21, а). Импульсы переменного тока принято называть радиоимпульсами (рис. 21, б).

Спектры сигналов, передаваемых одиночными импульсами или короткими сериями таких импульсов, существенно отличаются от спектров периодических сигналов.
Например, периодическая последовательность прямоугольных импульсов со скважностью, равной двум (рис. 22, a), достаточно хорошо описывается суммой первых трех гармоник, тогда как одиночный импульс (период бесконечен) для своего отражения требует непрерывного спектра гармонических колебаний.
Возрастание периода следования импульсов ведет к увеличению спектра частот, необходимых для их описания (рис. 22, б). Таким образом, любая последовательность импульсов может быть представлена суммой постоянной составляющей с амплитудой Аo и гармоник, кратных частоте повторения импульсов  т.е. кратных основной гармонике (k = 1).
т.е. кратных основной гармонике (k = 1).
Другие рефераты на тему «Транспорт»:
- Эффективность воздушного транспорта и его основные показатели функционирования
- Проект сервисного центра по обслуживанию автовладельцев Московского р-на г. СПб. Разработка услуги по абонементному обслуживанию
- Расчетное задание по внедрению в эксплуатацию морского судна
- Смазочная система двигателя ВАЗ 21081
- Тележка мостового крана