Балансировка роторной системы
Таблица 4
Результаты расчета положения корректирующей массы в плоскости МО1
|
Расчетный груз |
Разложение грузов | |||
|
плоскость М01 |
доступные углы |
разло жение груза | ||
|
Груз |
5,66 |
Угол 1 |
20 |
4,062 |
|
Угол |
24,3 |
Угол 2 |
35 |
1,6396 |
Таблица 5
Результаты расчета положения корректирующей массы в плоскости МО2
|
Расчетный груз |
Разложение грузов | |||
|
плоскость М02 |
доступные углы |
разложение груза | ||
|
Груз |
0,79 |
Угол 1 |
335 |
0,3031 |
|
Угол |
344,3 |
Угол 2 |
350 |
0,4932 |
3 Оценка адекватности проведенной балансировки
Для оценки адекватности проведенной балансировки определим относительные погрешности в горизонтальной и вертикальной плоскостях .
Погрешности определяются по следующим формулам:
 (7)
(7)
Результаты расчета погрешностей выбранной математической модели представлены в таблице 6.
Таблица 6 –
Погрешности балансировки
|
Плоскость коррекции |
γ% |
mk% |
|
01 |
4,00 |
14,04 |
|
02 |
13,0 |
80,065 |
Вывод: Различие корректирующей массы вызвано погрешностью измерения, т.к. приемник установлен на магните и при большой частоте вращения ротора возникает “плавание” датчика.
Список литературы
1. Захезин А.М., Колосова О.П., Малышева Т.В. Теоретическая и прикладная механика: Учебное пособие. – Челябинск: Изд. ЮУрГУ, 2001. – 47с.
Приложение
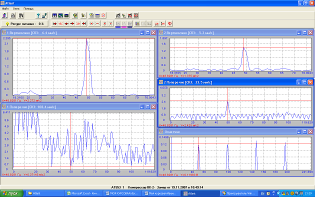
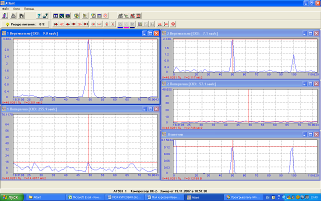
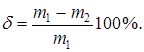
Рисунок 3 – Величина дисбалансов на определённой частоте, определённого вибросигнала

Рисунок 4 – Величина дисбалансов на определённой частоте, определённого вибросигнала

Рисунок 5 – Разложение масс ![]() и
и ![]() грузов
грузов
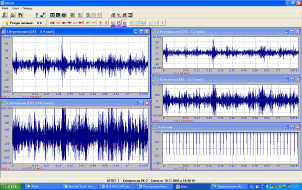
Рисунок 6 – Диаграмма сигналов и спектров
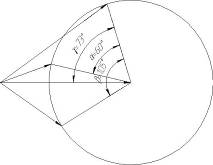
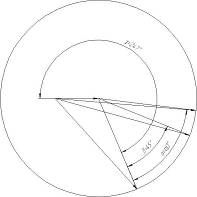

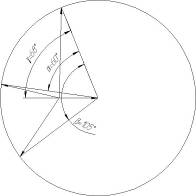
Рисунок 7 – Векторная диаграмма дисбалансов:
А) Первая плоскость, направление вертикальное;
Б) Вторая плоскость, направление горизонтальное.
Другие рефераты на тему «Транспорт»:
- Особенности перевозки пассажиров и их багажа железнодорожным транспортом
- Проектирование строительно-монтажных работ по сооружению контактной сети
- Особенности ремонта топливной системы автомобиля КамАЗ
- План перевозок и работы подвижного состава отделения железной дороги в грузовом движении
- История железной дороги Санкт-Петербург - Москва
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск