Диагностирование асинхронных электродвигателей
С помощью нейронной сети планируется также выполнять прогнозирование повреждений в электродвигателе. Аппаратная часть комплекса, структура которой изображена на рис. 2, включает в себя 10 блоков, из которых 7 блоков являются одинаковыми входными блоками, а 3 других блока являются основными.
Главный блок устройства - измерительный - выполняет функции измерения входного сигнала, управление бл
оком переключения диапазонов и исполнительным блоком, а также обмен информацией между компьютером и устройством. Входные блоки служат для масштабирования входного измеряемого уровня напряжения для его изменения в пределах от 0 до 5 В. Каждый входной блок поддерживает работу в трех диапазонах напряжения (от 0 до 100 В с точностью 0,1 В, от 10 до 1000 В с точностью 1 В и от 100 до 10000 В с точностью 10 В). Для автоматического выбора текущего измеряемого диапазона напряжения используется блок переключения диапазонов, который управляет входными блоками, получая команды на переключение от измерительного блока. Исполнительный блок служит для управления работой электродвигателя или для сигнализации о произошедшей поломке электродвигателя.
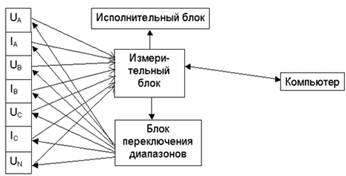
Рис. 2. Структура аппаратной части диагностического комплекса
В качестве основы для реализации измерительного блока, принципиальная схема которого изображена на рис. 3, был выбран недорогой микроконтроллер фирмы ATMEL ATmega8535 RISC-архитектуры со встроенным 8-канальным аналого-цифровым преобразователем (АЦП) /14/. Данный микроконтроллер имеет 512 байт энергонезависимой памяти EEPROM, которую можно использовать для хранения калибровочных коэффициентов и настроек, относящихся к диагностируемому электродвигателю. Микросхема FT245BM используется для связи измерительного блока с компьютером через интерфейс USB 2.0. Однако возникли дополнительные трудности, связанные с низким быстродействием АЦП данного микроконтроллера, в результате чего получается слишком мало экспериментальных значений измеряемой величины на анализируемом периоде сигнала электродвигателя. Можно воспользоваться более мощным и быстрым многоканальным АЦП или несколькими одноканальными АЦП, работающими параллельно, однако оба этих способа значительно завысят себестоимость аппаратной части комплекса. Решением этой проблемы стал программный метод, при помощи которого происходит получение более детального графика сигнала на одном периоде путем анализа сразу нескольких периодов сигнала.
Идея метода изображена на рис. 4. На координатной плоскости рисунка имеются радиус-векторы, вращающиеся с угловой скоростью wt. Длина радиус-вектора равна текущему значению полной потребляемой мощности Pi. Таким образом, текущее состояние сигнала удобно представить в виде комплексного числа i, значение которого можно выразить через формулу Коши-Адамара:
![]() (1)
(1)
где i - точка текущего состояния сигнала полной потребляемой мощности;
Pi - текущее значение полной потребляемой мощности;
wi - текущий угол поворота ротора относительно начального положения.

Рис. 3. Структура искусственной нейронной сети, используемой для идентификации сигнала полной потребляемой мощности
Например, сначала происходит измерение трех значений сигнала на первом периоде 1, 2 и 3, затем через некоторое смещение угла относительно w1, соответствующее значению , происходит получение следующих трех значений сигнала 4, 5 и 6 на втором периоде.

Рис. 4. Детализация графика сигнала полной потребляемой мощности
Аналогичным образом получаются точки для следующих периодов в зависимости от требуемого количества точек сигнала. Соединив полученные точки в порядке, определяемом углом вращения wi, сплошной линией, мы получим более детальный график сигнала, содержащий необходимое число экспериментальных точек. Схематически пример получения детального графика одного периода для сетевого напряжения промышленной частоты 50 Гц показан на рис. 9.
Таким же образом происходит получение графика одного периода полной потребляемой мощности асинхронного электродвигателя. Чем выше скорость вращения ротора электродвигателя, тем больше периодов анализируется, до того, как будет произведена попытка определения неисправности в электродвигателе. Естественно такая обработка сигнала снижает общее быстродействие диагностического комплекса. Можно даже не выполнять идентификацию полученного периода, а свести эту задачу к задаче распознавания образа замкнутой фигуры, изображенной на рис. 10, и по форме данной фигуры судить о присутствии какой-либо неисправности в электродвигателе. В этом случае способ диагностики получается более наглядным, но и более сложным в реализации.
Также изначально планировалось в качестве измерительных датчиков тока использовать токовые клещи с широким диапазоном измерения тока. Это позволило бы разработать универсальный и удобно-подключаемый программно-аппаратный комплекс. Но из-за очень высокой стоимости токовых клещей в аппаратной части комплекса используются обычные трансформаторы тока.
Как показано на рис. 5, для оценки напряжения между фазой C электродвигателя и нейтралью производится измерение разности потенциалов между нейтралью и корпусом устройства UN, а также между фазой и корпусом устройства UC. Затем, получив разность этих двух напряжений, находится значение напряжения между фазой C и нейтралью. Аналогичным образом происходит получение значения напряжения для фаз A и B. Данный механизм измерения используется для того, чтобы убрать гальваническую связь между устройством и цепью электродвигателя.

Рис. 5. Схема подключения измерительной части комплекса к цепи электродвигателя
Напряжение с токовых датчиков или с фаз электродвигателя подается на измерительный вход входного блока, изображенного на рис. 6. Входное напряжение подается через один их трех делителей в зависимости от текущего диапазона напряжения. Каждый делитель подключается при помощи реле, после получения соответствующего сигнала на базу одного из трех транзисторов от блока переключения диапазонов. Реле во входном блоке являются герконовыми, так как они потребляют небольшой ток и при этом сравнительно бесшумны. Текущий входной делитель выбирается блоком переключения диапазонов таким образом, чтобы на выходе делителя уровень напряжения был в пределах от -1,25 В до 1,25 В. Но учитывая, что аналого-цифровой преобразователь микроконтроллера выполняет измерение только неотрицательных сигналов от 0 до 2,5 В, дополнительно на выходной сигнал подается постоянное напряжение смещения с интегрального стабилизатора CL1 через делитель R9 и R10, на выходе которого образуется +1,25 В.

Другие рефераты на тему «Транспорт»:
- Эксплуатация и техобслуживание автомобилей и тракторов
- Морфология транспортной системы и других инженерных коммуникаций города
- Проектирование производственного участка по формированию среднего блока танкера–химовоза
- Анализ методик расчета различных транспортных задач
- Турбокомпрессор ТКР-23 дизеля М-756 тепловоза
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск