Математическая модель системы в переменных пространства состояний
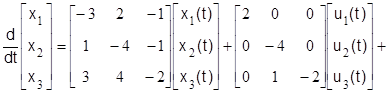
 ,
,  , (3.2.4)
, (3.2.4)
 . (3.2.5)
. (3.2.5)
Решение.
Запишем для системы (3.2.4) характеристическое уравнение (3.1.1)

![]() . (3.2.6)
. (3.2.6)
Раскроем скобки и приведем подобные члены, получим следующее характеристическое уравнение:
![]() . (3.2.7)
. (3.2.7)
Устойчивость системы будем определять на основе алгебраического критерия устойчивости Гурвица, составив для этого по уравнению (3.2.7) матрицу Гурвица
 . (3.2.8)
. (3.2.8)
Для устойчивости линейной системы по критерию Гурвица необходимо и достаточно, чтобы при положительности коэффициента при старшей степени (в нашем случае коэффициент при λ3 равен 1) были положительными и все n диагональных определителей Гурвица, то есть Δi>0 (i=1,2,3)
![]() ,
, 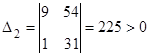 .
.
В соответствии с вышеизложенным находим, что свободный член характеристического уравнения (3.2.7) равный 54 - положительный.
Следовательно, система (3.2.4) является устойчивой.
УПРАВЛЯЕМОСТЬ
ОСНОВНЫЕ ПОНЯТИЯ И РАСЧЕТНЫЕ ФОРМУЛЫ
Управляемость системы (2.1.1), (2.1.2) по состояниям определяется теоремой (критерием) Калмана: система будет управляемой тогда и только тогда, когда ранг матрицы управляемости Lc размерности ![]() равен n, то есть
равен n, то есть
rank![]() n, (4.1.1)
n, (4.1.1)
где
![]() . (4.1.2)
. (4.1.2)
Если rank![]() <n, то система будет частично управляемой, а при rank
<n, то система будет частично управляемой, а при rank![]() =0 – полностью неуправляемой.
=0 – полностью неуправляемой.
Управляемость системы (2.1.1), (2.1.2) по выходам (критерий Калмана): система будет управляемой тогда и только тогда, когда ранг матрицы управляемости ![]() размерности
размерности ![]() равен l то есть
равен l то есть
rank![]() =l, (4.1.3)
=l, (4.1.3)
где
![]() . (4.1.4)
. (4.1.4)
Если rank![]() <l, то система будет частично управляемой по выходам, а при rank
<l, то система будет частично управляемой по выходам, а при rank![]() =0 – полностью неуправляемой.
=0 – полностью неуправляемой.
Показатель степени n в выражениях (4.1.2), (4.1.4) соответствует размерности вектора состояний.
4.2. ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
Задача 4.2.1
Определить управляемость динамической системы по состояниям, заданной векторными уравнениями
 ,
,
(4.2.1)
 . (4.2.2)
. (4.2.2)
Решение.
В соответствии с выражением (4.1.2) запишем матрицу управляемости для n=2, так как в рассматриваемом случае размерность вектора состояний n=2
![]() .
.
Найдем произведение матриц
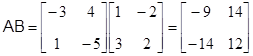 .
.
Следовательно, матрица управляемости имеет вид
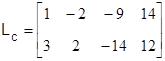 ,
,
и ее ранг rank![]() 2, то есть настоящая система полностью управляема по состояниям.
2, то есть настоящая система полностью управляема по состояниям.
Задача 4.2.2
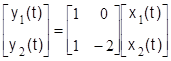
Определить управляемость по выходам динамической системы, заданной векторными уравнениями
 ,
,
.
Решение.
В соответствии с выражением (4.1.2) запишем матрицу управляемости для n=2, так как в рассматриваемом случае размерность вектора состояний n=2
![]() .
.
Найдем произведение матриц
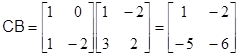 .
.
 .
.
Следовательно, матрица управляемости имеет вид
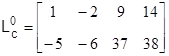 ,
,
и ее ранг rank![]() =2, то есть настоящая система полностью управляема по выходам.
=2, то есть настоящая система полностью управляема по выходам.
5. НАБЛЮДАЕМОСТЬ
5.1. ОСНОВНЫЕ ПОНЯТИЯ И РАСЧЕТНЫЕ ФОРМУЛЫ
Наблюдаемость системы (2.1.1), (2.1.2) определяется теоремой (критерием) Калмана: система будет вполне наблюдаемой тогда и только тогда, когда ранг матрицы наблюдаемости L0 размерности ![]() равен n, то есть
равен n, то есть
rank![]() n, (5.1.1)
n, (5.1.1)
где
 . (5.1.2)
. (5.1.2)
Если rank![]() <n, то система будет не вполне наблюдаемой, а при rank
<n, то система будет не вполне наблюдаемой, а при rank![]() =0 – полностью ненаблюдаемой.
=0 – полностью ненаблюдаемой.
5.2. ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
Задача 5.2.1
Определить наблюдаемость динамической системы, заданной векторными уравнениями

 .
.
Решение.
В соответствии с выражением (5.1.2) запишем матрицу наблюдаемости для n=2, так как в рассматриваемом случае размерность вектора состояний n=2
![]() .
.
Найдем произведение матриц

 .
.
Следовательно, матрица наблюдаемости имеет вид
 ,
,
и ее ранг rank![]() 2, то есть настоящая система полностью наблюдаема.
2, то есть настоящая система полностью наблюдаема.
Другие рефераты на тему «Экономико-математическое моделирование»:
Поиск рефератов
Последние рефераты раздела
- Выборочные исследования в эконометрике
- Временные характеристики и функция времени. Графическое представление частотных характеристик
- Автоматизированный априорный анализ статистической совокупности в среде MS Excel
- Биматричные игры. Поиск равновесных ситуаций
- Анализ рядов распределения
- Анализ состояния финансовых рынков на основе методов нелинейной динамики
- Безработица - основные определения и измерение. Потоки, запасы, утечки, инъекции в модели