Проект гелеоисточника для энергохозяйства
6. По числу уровней модуля обобщенного вектора напряжения трехфазного инвертора различают одноуровневые алгоритмы управления, реализуемые в классических трехфазных мостовых схемах инверторов, и многоуровневые алгоритмы управления, реализуемые в модифицированных схемах трехфазных инверторов.
Для оценки качества выходного напряжения инвертора при синусоидальной широтно-импульсной модуляции не
обходимо знать спектры напряжения. Теория спектров широтно-модулированных последовательностей импульсов первоначально получила развитие в радиотехнике, где исследовалась возможность построения мощных усилителей сигналов, работающих в режиме переключения модуляции, а также в теории связи, где изучалась возможность использования ШИМ для помехоустойчивой передачи сообщений. Был разработан эффективный метод нахождения спектров напряжений при широтно-импульсной модуляции, названный методом временной деформации. Технология применения этого метода достаточно проста. Сначала находят спектр немодулированной последовательности прямоугольных (или любой другой формы) импульсов. Затем в выражение для полученного спектра подставляют вместо регулируемого параметра (момента фронта импульса, длительности импульса) его принятый закон изменения во времени (закон модуляции). Полученное выражение приводят к виду, удобному для применения.
Таким образом, можно показать, что спектр напряжения при синусоидальной широтно-импульсной модуляции второго рода содержит помимо первой высшие гармоники, частоты которых [16]:
![]() (1.4)
(1.4)
где к, l – равны целым числам.
При двухсторонней ШИМ в трехфазном инверторе в фазном напряжении инвертора (рис 1.6.) будут присутствовать только гармоники порядка п = kKТ ±l, где КT – кратность частоты коммутации, а k не кратно трем и отсутствуют комбинации, состоящие из двух нечетных либо четных чисел т и l рис. 1.5.
Реализация двухполярной ШИМ возможна в любой базовой схеме однофазного инвертора, а однополярная – только в полумостовой с нулевыми вентилями и мостовой схемах. Все эти схемы инверторов, выполненных на реальных вентилях, имеют общий недостаток, связанный с конечным временем выключения вентилей. При этом из вновь включаемого вентиля и выключаемого вентиля (транзистора) на время его выключения образуется цепь короткого замыкания источника входного напряжения и через транзисторы текут короткие импульсы больших сквозных токов, которые увеличивают потери и, если их не ограничить, в состоянии вывести транзисторы из строя. Поэтому в реальных системах между моментом запирания одного транзистора плеча моста и полумоста и моментом отпирания другого транзистора этого же плеча вводится «мертвая пауза», обычно порядка одной микросекунды [16].
Зависимость фазного напряжения трехфазного инвертора от высших гармоник.
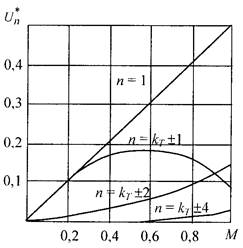
Рисунок 1.5. Двухсторонний ШИМ в трехфазном инверторе
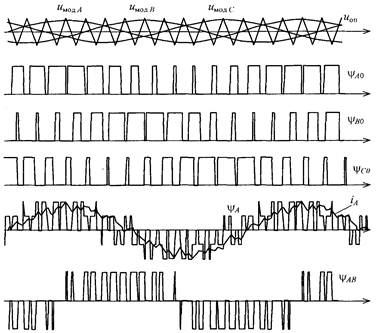
Рисунок 1.6 Индексная табличная ШИМ в автономном инверторе напряжения
В настоящее время массовым и перспективным стал автономный инвертор напряжения (АИН) с широтно-импульсной модуляцией (ШИМ).
В общем случае все виды ШИМ основаны на изменении длительности импульсов равной амплитуды, следующих через равные интервалы времени в соответствии с принятым законом формирования напряжения. Законы формирования, общие для любого метода модуляции, определяются функцией построения (модулирующим сигналом). На основании литературных данных целесообразно распределить разновидности ШИМ по степеням соответствия параметров импульсов значениям модулирующего сигнала согласно основным признакам (рис. 1.7). [4]
Следует отметить, что в связи с развитием методов формирования синусоидальных напряжений, трапецеидальная ШИМ уже почти вытеснена синусоидальной. Двуполярная ШИМ характеризуется постоянным действующим значением выходного напряжения, поэтому регулирование значения основной гармоники сопровождается перераспределением энергии в спектре. Однополярная ШИМ дает лучший гармонический состав, действующие значения напряжения при этом меньше, чем в двуполярном варианте.
Современные преобразователи строятся с использованием микроконтроллеров (МК), с помощью которых реализуется и ШИМ. В связи с этим вводится новый термин – тактовая частота ШИМ Fт, которая определяется точностью аппроксимации несущего Fн и модулирующего Fм сигналов. Как правило, соотношения между ними выбираются следующими:
Fн = n3Fм (n=2, 3, 4,…) и Fт = m2Fн (m=3,4,5,…) (1.5)
Классификация видов ШИМ.
Реализация ШИМ на МК возможна двумя способами: традиционный (формирование выходных напряжений осуществляется в результате постоянного сравнения модулирующего и несущего сигналов) и табличный (полностью рассчитывается заранее и заносится в ПЗУ, из которого затем считывается).
При реализации ШИМ традиционным способом приходится использовать либо универсальные мощные микроконтроллеры, либо специализированные, относительно дорогие контроллеры. Реализация сложных алгоритмов ШИМ традиционным способом затруднена на универсальных МК большим объемом программы, а на специализированных – возможностями архитектуры конкретного типа МК. Специализированные МК, имеющие аппаратную поддержку ШИМ выпускаются такими фирмами как MOTOROLA, TEXAS INSTRUMENTS, и другими [5].

Рисунок 1.7
ШИМ – генераторы МК этого типа имеют от двух до шести независимых каналов и управляются несколькими программно доступными регистрами. ШИМ – генераторы позволяют реализовывать синхронизацию каналов, формирование «мертвого» времени, его компенсацию, выравнивание импульсов по фронту или по центру, встроенные защиты от неисправностей, некоторые другие функции. Частоту несущего сигнала можно регулировать от 8 МГц до 125 Гц. В последнее время вместо встроенных ШИМ – генераторов микроконтроллеры оснащаются более универсальными средствами, которые, в том числе, реализуют и алгоритмы ШИМ. В контроллерах MOTOROLA это так называемый таймерный сопроцессор TPU (Timer Processor Unit). Имеется в виду многоканальный таймер с очень гибкой схемой управления, полуавтономной от ядра контроллера. Программирование TPU осуществляется либо полностью, либо с использованием стандартных подпрограмм, в числе которых имеется и ШИМ с аналогичными указанным выше параметрами. Все перечисленные МК ориентированы на реализацию двуполярной ШИМ которая, как указывалось, не позволяет получить наилучший гармонический состав выходного напряжения. [6]
Достоинства табличного способа заключаются в том, что он позволяет реализовать любые алгоритмы ШИМ с высокой несущей частотой с помощью микроконтроллеров, весьма бедных в функциональном отношении. Тем не менее, этот способ не нашел широкого применения из-за следующих причин.
Обычно табличная ШИМ подразумевает поочередное считывание с частотой Fт того из массивов ПЗУ, который в настоящий момент соответствует заданным выходным параметрам. В результате, для реализации такой табличной ШИМ необходимо не менее 64 кБ (Fмmax = 60 Гц; диапазон регулирования (0.5–120)% дискретность регулирования примерно 0.5%). Этим практически исчерпываются возможности дешевых 8‑разрядных МК. [6]
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
- Расчет параметров и режимов работы транзисторных каскадов усилителя низкой частоты
- Биллинговые системы
- Проектирование автоматизированной системы управления
- Дидактические возможности телекоммуникационной среды на уроках информатики в повышении качества знаний
- Психоакустическое восприятие и midi-интерфейсы
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем