Проект гелеоисточника для энергохозяйства
Еще одна трудность – плавное регулирование тактовой частоты ШИМ при изменении частоты модулирующего сигнала. Здесь, как правило, применяется управляемый напряжением генератор, либо целочисленный 16‑разрядный предварительный делитель, сигнал с которого вводится в МК.
Предлагается новый способ табличной реализации ШИМ, свободный от указанных недостатков – «индексная» табличная ШИМ, кото
рая реализуется по следующим принципам.
Сначала составляется нумерованный массив с допустимыми сочетаниями состояний вентилей АИН. Назовем его массивом состояний. Затем обычным способом рассчитываются массивы для всех частот модулирующего сигнала. После этого в каждом массиве, соответствующем конкретной частоте Fм, сохраняются только строки (с сохранением исходной нумерации), в которых происходит переключение, все остальные строки удаляются. Из этих «сокращенных» массивов составляются индексные массивы, которые содержат номера шагов (периода тактовой частоты ШИМ на периоде модулирующего сигнала), на которых происходят переключения и соответствующий индекс массива состояний. Индексные массивы и массив состояний записываются в ПЗУ, после чего ШИМ осуществляется обычным способом.
Алгоритм работы предлагаемой ШИМ приведен на рис. 1.8.
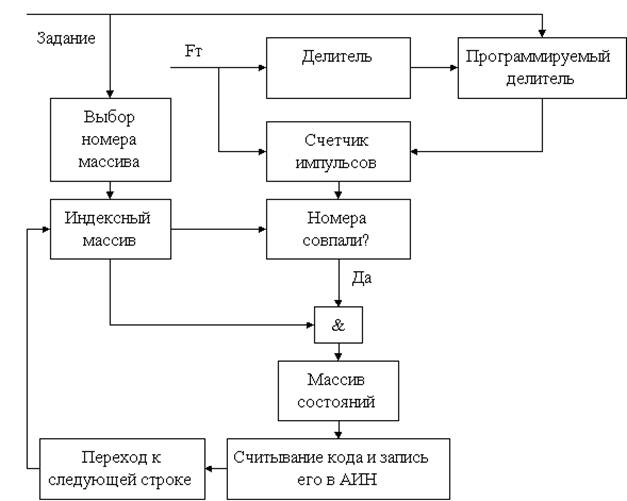 Рисунок 1.8. Алгоритм работы индексной ШИМ
Рисунок 1.8. Алгоритм работы индексной ШИМ
Индексно-табличная реализация ШИМ требует существенно меньшего объема памяти, чем традиционная. Например, для получения указанных выше параметров (Fмmax = 60 Гц; диапазон регулирования (0.5–120)% дискретность регулирования примерно 0.5%) индексная ШИМ требует менее 11 кБ. Экономия объема памяти позволяет довести соотношение Fт/Fн до 40 (тактовая частота ШИМ Fт примерно 48кГц) и, тем самым, увеличить точность аппроксимации несущего и модулирующего сигнала не менее, чем в 4 раза. [7]
Таким образом, предлагаемая индексно – табличная ШИМ позволяет получить высокие показатели АИН, используя дешевые 8‑разрядные микроконтроллеры. Тем более, все резервы этого класса МК еще не использованы, т. к. выпускаемые сейчас высокоскоростные модификации МК семейства MCS‑51 (например, 80C3x0 фирмы DALLAS SEMICONDUCTOR) работают в 8.25 раза быстрее младших моделей этого семейства (КР1830ВЕ31).
2. Разработка системы управления
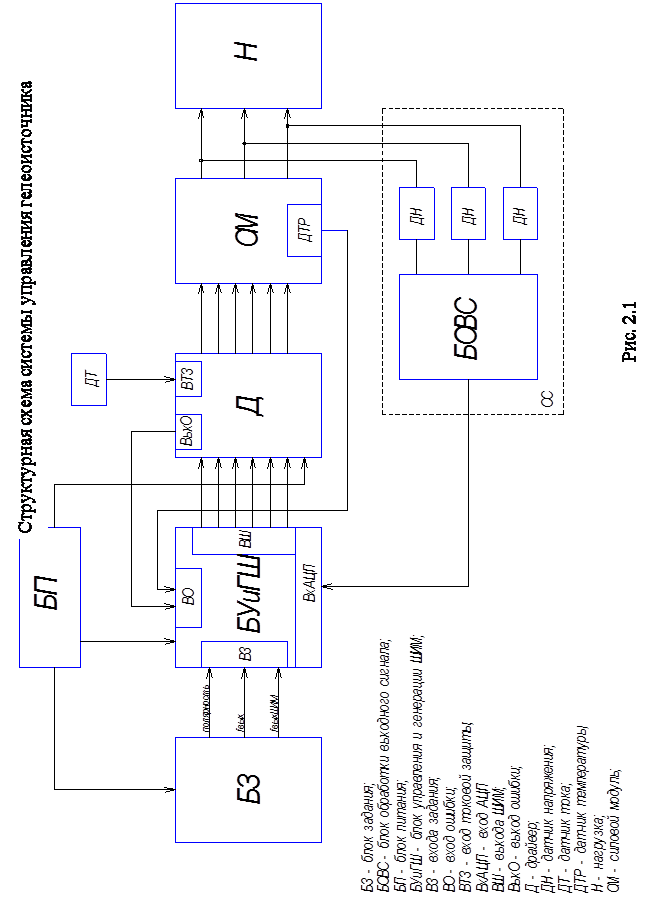
2.1 Описание схемы управления
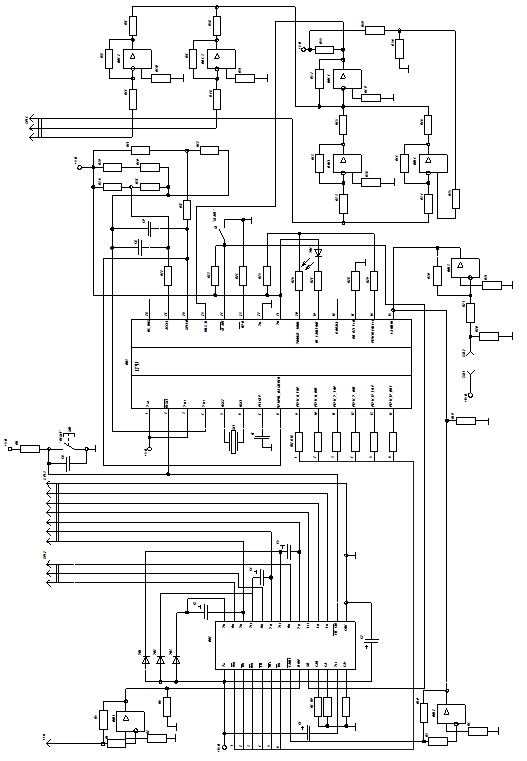
Структурная схема системы управления гелеоисточника изображена на рис. 2.1., на рис. 2.2 – схема электрическая принципиальная. Блоком управления (БУ) системы управления является микроконтроллер Motorola МС3РНАС, рис. 2.3, основные параметры микросхемы сведены в таблицу 2.1. Микросхема имеет встроенный модуль трехфазного ШИМ, для управления шестью ключевыми элементами, также есть 4‑х канальный АЦП, и последовательный интерфейс необходимый при режиме управления микроконтроллером с ПК. Модуль трехфазного ШИМ генерирует 6 ШИМ сигналов для задания выходного напряжения и частоты.
Таблица 2.1. Основные параметры микросхемы МС3РНАС
|
№ |
Название параметра. |
Значение и единица измерения |
|
1. |
Напряжение питания |
5 В ± 10% |
|
2. |
Рабочая частота кварцевого генератора |
4 МГц ± 1% |
|
3. |
Частота ШИМ |
5,291 – 21,164 кГц |
|
4. |
Задержки переключений |
0 – 31,875 мкс |
|
5. |
Рабочая температура |
– 40 – 1050 С |
Назначение выводов МК[1]:
1. Vref – эталонное напряжение. Соединяется с VDDA для лучшего соотношения сигнал/шум.
2. RESET – вход сброса. Низкий логический уровень сигнала на этом входе переводит все PWM выхода в высокоимпедансное состояние. Также данный вход может быть использован для сброса ошибки (например: низкий уровень VDD, ошибки времени, подача на вход FAULT_IN сигнала высокого уровня).
3. VDDA – питание внутренних генераторов.
4. VSSA – питание внутренних генераторов. 5 и 6 – вывода подключения кварцевого генератора.
7. PLLCAP – вывод подключения помехозащитного конденсатора. Малое значение емкости позволяет быстро формировать f эталонную. Большие значения позволяют улучшить стабильность. Значение емкости конденсатора 0,1 мкФ является типовым и рекомендовано производителем.
8. PWMPOL_BASEFREQ – вход задания базовой частоты и полярности ШИМ. 9 – 14 – выхода формирователя ШИМ.
15. FAULTIN – вход ошибки. При высоком логическом уровне сигнала на входе мгновенно отключаются PWM выхода. Включаются PWM выхода только после появления на входе сигнала низкого логического уровня.
16. PWMFREQ_RxD – в автономном режиме эта ножка используется для задания частоты ШИМ.
17. RETRY_TxD – выход управления ключом промежуточного контура.
18. RBRAKE – выход управления ключом промежуточного контура, для сброса энергии.
19. FAULTOUT – данный вывод используется для индикации ошибки.
20. VBOOST_MODE – вывод задания режима работы МК. Высокий логический уровень – автономный режим работы, низкий – режим работы с ПК.
21. VDD – напряжение питания, +5V.
22. Vss – вывод земли.
![]() 23. FWD – вход задания направления вращения двигателя.
23. FWD – вход задания направления вращения двигателя.
![]() 24. START – вход включения.
24. START – вход включения.
 |
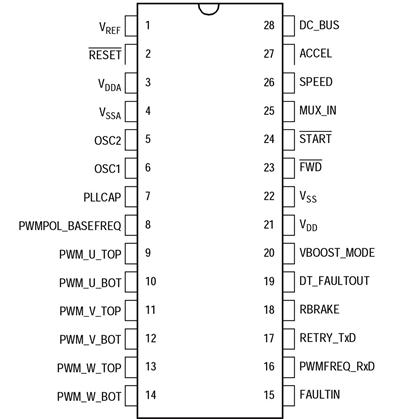 |
Микроконтроллер Motorola МС3РНАС.
Рисунок 2.2
25. MUX_IN – в автономном режиме является входом регулирования коэффициента заполнения.
26. SPEED – задание частоты вращения двигателя.
27. ACCEL – вход, влияющий на разгон двигателя.
28. DC_BUS – вход для отслеживания напряжения промежуточного контура.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем