Виды девиации магнитного компаса
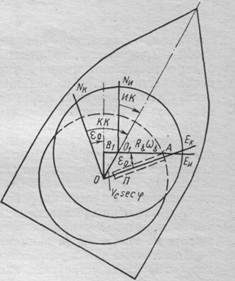
Палец западает в паз нижнего диска, эксцентрично соединяя оба диска. Верхний диск укреплен на специальной каретке и может сдвигаться относительно нижнего в направлении диаметральной плоскости судна. Расстояние 001 между центрами дисков можно устанавливать в зависимости от известных величин скорости судна и широты места. Из
рис. 37 видно, что направление паза П нижнего диска соответствует направлению
Ек — на восток гиросферы, поэтому курс судна по показаниям гиросферы, содержащий скоростную погрешность v, определится углом КК.
Устранение из показаний гирокомпаса скоростной погрешности V достигается установкой каретки с верхним диском в направлении диаметральной плоскости судна так, чтобы расстояние между центрами дисков было равно величине 001 = vcsec . Тогда курс КК, отсчитываемый по показаниям гиросферы, будет отличаться на величину угла 0 от курса ИК, отсчитываемого по верхнему диску (картушке компаса) от линии Nи01. Линия Nи01 перпендикулярна направлению 01А. Следовательно,
КК = ИК + 0.
Из прямоугольного треугольника B1OA находим:
tg 0 = B1O/(AO1 + B1O1)
В гирокомпасе с электромагнитным управлением использован более простой способ устранения баллистических девиаций. Для этого маятник индикатора горизонта сильно задемпфирован, а углы его отклонения от равновесного положения ограничены специальными упорами до относительно малой величины.
Кроме того, чтобы снизить скорость баллистического перемещения гироскопа за время действия ускорения, период незатухающих колебаний в рабочем режиме гирокомпаса выбирается большим — до 120—180 мин.
Возможен еще один простой и, по-видимому, более эффективный способ устранения баллистических девиаций.
Если в индикаторе горизонта предусмотреть устройство, которое автоматически отключало бы сигнал индикатора горизонта от схемы управления гироскопом, когда маятник под действием ускорения достигает одного из упоров, то гироскоп вместо прецессирования с малой скоростью во время действия ускорения становится свободным. Можно ожидать, что в этом случае отклонение гироскопа за время маневрирования будет меньшим, чем при первом способе компенсации. Следует заметить, что в обоих случаях при маневрировании корректирующие моменты остаются приложенными к гироскопу.
Эффективным способом устранения баллистических девиаций для гирокомпасов с электромагнитным управлением является способ компенсации силы инерции, воздействующей на маятник индикатора горизонта при наличии линейных ускорений.
Интеркардинальная девиация. При движении судна в условиях качки следящая сфера гирокомпаса раскачивается вокруг своей оси подвеса в такт с качкой под действием составляющей ускорения в плоскости Е—W.
Составляющая ускорения в плоскости N—S, воздействующая на маятник следящей сферы, меняя свое направление синхронно-с качкой, создает вертикальный момент, аналогично тому, как это происходит у обычных маятниковых компасов, но в отличие от них в гирокомпасе с электромагнитным управлением этот момент сам по себе не вызывает интеркардинальной девиации.
Инерционные моменты, действующие на следящую сферу во время качки, приводят лишь к дополнительным динамическим нагрузкам на двигатели азимутальной и горизонтальной следящих систем, но не дают существенных ошибок в показаниях гирокомпаса.
Основная причина, определяющая появление интеркардинальной девиации у гирокомпаса с косвенным управлением, заключается в том, что составляющая ускорения в плоскости N—S действует и на маятник индикатора горизонта. Она вызывает появление сигнала, пропорционального ускорению и меняющего знак в такт с качкой. Этот сигнал поступает на двигатели, которые прикладывают к гироскопу через торсионы знакопеременные моменты. Поскольку одновременно происходит раскачивание следящей сферы, оси двигателей рассогласовываются с осями соответствующих торсионов на угол, примерно равный амплитуде качки. В результате, когда сигнал от индикатора горизонта поступает на двигатели, моменты, прикладываемые к гироскопу торсионами, создают две составляющие — горизонтальную и вертикальную.
Так как горизонтальные торсионы имеют жесткость, во много раз большую, чем вертикальные, то вертикальная составляющая моментов от горизонтальных торсионов по абсолютной величине значительно превосходит остальные вертикальные моменты. Она и образует постоянный вертикальный момент, вызывающий ингеркардинальную девиацию гирокомпаса па качке. Как видно, механика появления интеркардинальной девиации у гирокомпасов с электромагнитным управлением иная, чем у обычных маятниковых гирокомпасов, но схема образования постоянного вертикального момента при качке по существу одинакова.
Величина интеркардинальной девиации, закон ее изменения и зависимость от параметров гирокомпаса и качки для гирокомпаса с электромагнитным управлением в принципе остаются такими же, как и для одногироскопных маятниковых компасов.
Из известных способов компенсации интеркардинальной девиации для
гирокомпаса с электромагнитным управлением наиболее рациональным оказалось применение индикатора горизонта с сильно демпфированным маятником.
Введение в чувствительный маятниковый элемент вязкого трения позволяет осуществить сдвиг по фазе, близкий к 90°, между действующим ускорением и моментом, прикладываемым к гироскопу, в результате чего эффект влияния качки на гирокомпас сводится к минимуму.
Гиротахометром (ГТ) называется гироскопический прибор, предназначенный для измерения угловой скорости объекта относительно какой-либо оси. Довольно часто приборы такого назначения называют дифференцирующими гироскопами. Гиротахоакселерометром (ГТА) называют прибор, который обеспечивает одновременное измерение угловой скорости и углового ускорения объекта относительно какой-либо оси. Иногда подобные приборы именуют демпфирующими гироскопами.
Такие приборы применяются в системах автоматического управления движением объекта, а также в системах стабилизации, так как для обеспечения высокого качества процесса регулирования необходимо знать не только угол отклонения объекта от заданного положения, но также первую и вторую производные от этого угла.
На морском флоте гиротахометры находят применение как самостоятельные приборы, облегчающие плавание по криволинейной траектории (для выполнения циркуляции определенного радиуса при заданной линейной скорости), а также в системах стабилизации судна на качке для выработки сигнала, пропорционального угловой скорости крена судна.
Гиротахоакселерометры применяются в более сложных системах стабилизации судна на качке.
Наибольшее распространение получили гиротахометры, основным элементом которых является астатический гироскоп с двумя степенями свободы. На рис. 71 изображена принципиальная схема гиротахометра: гирокамера 1 с ротором, упругий элемент 2, ограничивающий движение гироскопа по углу , демпфирующее устройство 3, обеспечивающее затухание собственных колебаний, датчик угла 4 поворота гироскопа вокруг оси OY0. При той ориентации главной оси гироскопа, как это показано на рис. 71, гиротахометр может измерять угловую скорость вращения только вокруг оси OZ0. Соответствующей ориентацией главной оси можно обеспечить измерение угловой скорости относительно любой другой оси.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск