Система управления ДПТ путем регулирования тока возбуждения
Синтезируем систему комбинированного управления, добавив в неё дополнительное задание по скорости, которое выглядит следующим образом:
![]() ,
,
принимаем ![]()
Установившаяся ошибка должна быть![]()
Рис. 2 Модель ЭП с учетом дискретности преобразователей.
На рис. 4 блок Subsystem – блок, моделирующий стабилизатор напряжения, Subsystem1 – блок, моделирующий определения угла управления из уравнения В модели не учитывается дискретность ШИМ преобразователя в цепи возбуждения, так как частота коммутации достаточна для данного допущения.
Моделирование.
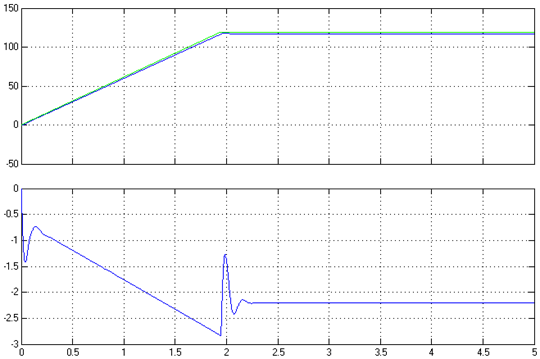
1. Пуск привода на номинальную скорость (7.78В) при линейном изменении задания.
Рис. 3 Графики зависимостей Статическая ошибка по скорости составляет 2.2 рад/с, что удовлетворяет требованиям.
Рис. 4 Переходный процесс по току якоря
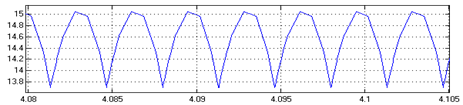
Рис. 5 Пульсации тока якоря в установившемся режиме
Из рис. 5 видно, что амплитуда пульсаций тока составляют 1.2 А, для двигателя допустимая амплитуда пульсаций 0.2*Iном = 0.2*14.6 = 2.92 А
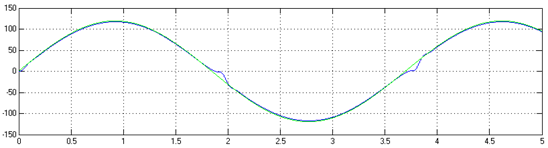
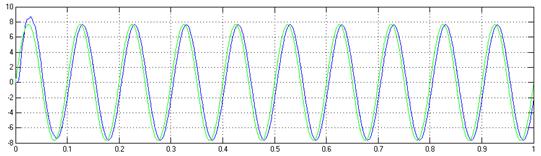
Отработка приводом синусоидального задания с Рис. 6 Графики зависимостей Проведем эксперимент отработки приводом задания Рис. 7 Графики зависимостей Полоса пропускания привода Рис. 8 Графики зависимостей 4. Разработка принципиальной электрической схемы и выбор её элементов
1. Контур тока якоря.
Принимаем
Необходимо ограничение выходного сигнала на уровне 10В, следовательно выбираем стабилитрон с напряжением стабилизации 10В.
В качестве датчика тока выбираем ДТХ – 10.
Технические данные ДТХ – 10:
Допустимая перегрузка по измеряемому току (разы) 1.5
Диапазон рабочих температур -20…+80 0С
Основная и приведенная погрешность 1%
Нелинейность выходной характеристики 0.1%
Номинальный ток 10 А
Коэффициент передачи 1:2000
Полоса пропускания 1…50000Гц
Источник питания 15В 10%
Рис. 9 Регулятор тока якоря. Схема принципиальная
Учитывая номинальный входной ток и коэффициент передачи, то номинальный выходной сигнал составляет 10/2000 = 0.005 А. Входной ток Рис. 10 Схема формирования сигнала - (UЗТЯ - UОТЯ)
Принимаем
Выбираем:
R9, R12 , R13 , R17 , R19 – C2-29В-0.125-10 кОм±0.05%
R6 – C2-29В-0.125-7.3 Ом±0.05%
R21 – C2-29В-0.125-192 Ом±0.05%
С17– К73-17-63В-12.3 мкФ±0.5%
VD2 – КС210Б
DA1.4, DA1.6, DA1.8 – К140УД17А
DA2 – AD1403
2. Контур скорости
Выберем тахогенератор ТГП-60.
Технические данные ТГП-60:
Номинальная частота вращения 1500 об/мин
Крутизна выходного напряжения 60 мВ/(об/мин)
Нелинейность выходного напряжения 0.1 %
Асимметрия выходного напряжения 0.2 %
Коэффициент пульсации 2.5%
Сопротивление нагрузки 6 кОм
Температурный коэффициент
выходного напряжения 0.01%/0С
Момент инерции ротора 10-5 кг/м2
Статический момент трения 10-2 Нм
Максимальная частота вращения привода 1140 об/мин, тогда напряжение на выходе тахогенератора Рис. 11 Схема формирования сигнала КРС(- UЗС + UОС)
Принимаем
В связи с коммутационными процессами, имеющими место в коллекторном узле тахогенератора, необходим фильтр.
Принимаем постоянную времени фильтра Выходной сигнал ограничивается на уровне 10В стабилитроном с напряжением стабилизации 10В.
Выбираем:
R1 – C2-29В-0.125-87.4 кОм±0.05%
R2, R5, R7 – C2-29В-0.125-10 кОм±0.05%
R3, R4 – C2-29В-0.125-145 Ом±0.05%
С1 – К73-17-63В-46 пФ±0.5%
VD1 – КС210Б
DA1.1, DA1.2 – К140УД17А
Блок компенсации по первой производной скорости:
Рис. 12 Схема формирования сигнала (КК ∙р)
Принимаем
Выбираем:
R8 – C2-29В-0.125-1 МОм±0.05%
С4 – К73-17-63В-1.5 мкФ±0.5%
DA1.3 – К140УД17А
3. Контур тока возбуждения
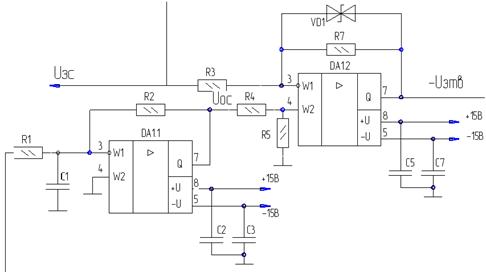
Рис. 13 Регулятор тока возбуждения. Схема принципиальная
Принимаем
Необходимо ограничение выходного сигнала на уровне 10В, следовательно выбираем стабилитрон с напряжением стабилизации 10В.
 . Где Uу – напряжение управления, приведенное к стандартному ряду -10…10В, Um – максимальное напряжение пилообразного сигнала, приведенный к стандартной шкале -10…10В.
. Где Uу – напряжение управления, приведенное к стандартному ряду -10…10В, Um – максимальное напряжение пилообразного сигнала, приведенный к стандартной шкале -10…10В.
![]() .
.

![]()
![]() .
.
![]()
![]() .
.
![]() , при
, при ![]()

![]() .
.
![]() ,
,


![]() , тогда выходной ток
, тогда выходной ток ![]()

![]() ,
,

![]() .
.
![]() ,
,
![]()
![]()
![]()
![]() с.
с.
![]()

![]() ,
,
![]()

![]() ,
,

Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела