Механизм поперечно-строгального станка
2.2 Расчет диады 4-5
Для расчета этой диады изобразим ее со всеми приложенными к ней силами: силами тяжести, полезного сопротивления и реакциями.
Эти реакции в поступательных парах известны по направлению, но неизвестны по модулю. Определяем с помощью плана сил. Составим уравнение равновесия диады 4-5.

Строим план
сил диады в масштабе сил
![]()
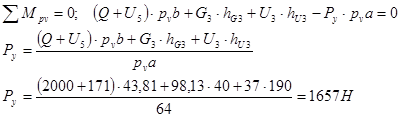
Уравнение содержит три неизвестных, поэтому составляем дополнительное уравнение равновесия в форме моментов сил относительно точки С.

Рассчитаем вектора сил
Строим план сил по уравнению сил, в том порядке как силы стояли в уравнении.
Значения сил из плана сил

Для рассмотрения внутренних реакций в диаде 4-5 необходимо рассмотреть равновесие одного звена, звена 4.
![]()
2.3 Расчет диады 2-3
Изобразим диаду со всеми приложенными к ней силами. В точках А и О2 взамен отброшенных связей прикладываем реакции ![]() и
и ![]() . В точке В прикладываем ранее найденную реакцию
. В точке В прикладываем ранее найденную реакцию![]() . Составляем уравнение равновесия диады 2-3.
. Составляем уравнение равновесия диады 2-3.

Плечи измеряем на плане. Теперь в уравнении сил две неизвестных, поэтому строим план сил и определяем реакцию![]() , как замыкающий вектор.
, как замыкающий вектор.
Строим план диады в масштабе сил ![]() . Значения сил из плана сил.
. Значения сил из плана сил.
![]()
![]()
2.4 Расчет кривошипа
Изобразим кривошип с приложенными к нему силами и уравновешивающей силой ![]() , эквивалентной силе действия на кривошип со стороны двигателя. Действие отброшенных связей учитываем вводя реакции
, эквивалентной силе действия на кривошип со стороны двигателя. Действие отброшенных связей учитываем вводя реакции ![]() и
и ![]() . Определяем уравновешивающую силу, считая, что она приложена в точке А кривошипа, перпендикулярно ему. Составляем уравнение равновесия кривошипа.
. Определяем уравновешивающую силу, считая, что она приложена в точке А кривошипа, перпендикулярно ему. Составляем уравнение равновесия кривошипа.
Значение силы определяем из плана сил.
2.5 Определение уравновешивающей силы методом Жуковского
Строим повернутый на 900 план скоростей и в соответствующих точках прикладываем все внешние силы, включая![]() и силы инерции. Составим уравнение моментов относительно точки
и силы инерции. Составим уравнение моментов относительно точки ![]() , считая
, считая ![]() неизвестной:
неизвестной:
Подлинность графического метода:
![]()
2.6. Определение мощностей
Потери мощности в кинематических парах:
![]()
Потери мощности на трение во вращательных парах:
![]()
где ![]() - коэффициент
- коэффициент
![]() - реакция во вращательной паре,
- реакция во вращательной паре,
![]() - радиус цапф.
- радиус цапф.
Суммарная мощность трения
![]()

Мгновенно потребляемая мощность

Мощность привода, затрачиваемая на преодоление полезной нагрузки.
![]()
2.7 Определение кинетической энергии механизма
Кинетическая энергия механизма равна сумме кинетических энергий входящих в него массивных звеньев.

Приведенный момент инерции
![]()
3 Геометрический расчёт эвольвентного зубчатого зацепления. Синтез планетарного редуктора
3.1 Геометрический расчёт равносмещённого эвольвентного зубчатого зацепления
Исходные данные:
число зубьев шестерни: Z![]() =14
=14
число зубьев колеса: Z![]() =28
=28
модуль зубчатых колёс: m=4мм
Нарезание зубчатых колес производится инструментом реечного типа, имеющего параметры:
![]() - коэффициент высоты головки зуба
- коэффициент высоты головки зуба
![]() - коэффициент радиального зазора
- коэффициент радиального зазора
![]() - угол профиля зуба рейки
- угол профиля зуба рейки
Суммарное число зубьев колёс:
![]()
![]() поэтому проектирую равносмещённое зацепление.
поэтому проектирую равносмещённое зацепление.
Делительно-межосевое расстояние:
![]() мм
мм
Начальное межосевое расстояние: ![]() мм
мм
Угол зацепления: ![]()
Высота зуба:
![]() мм
мм
Коэффициент смещения:
![]()
![]()
Высота головки зуба:
![]() мм
мм
![]() мм
мм
Высота ножки зуба:
![]() мм
мм
![]() мм
мм
Делительный диаметр:
![]() мм
мм
![]() мм
мм
Основной диаметр:
![]() мм
мм
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды