Модернизация приемной коробки станка СТБ 2-250

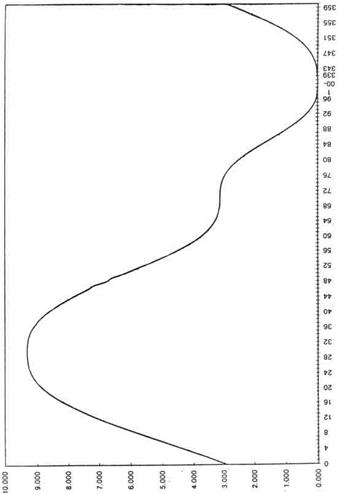
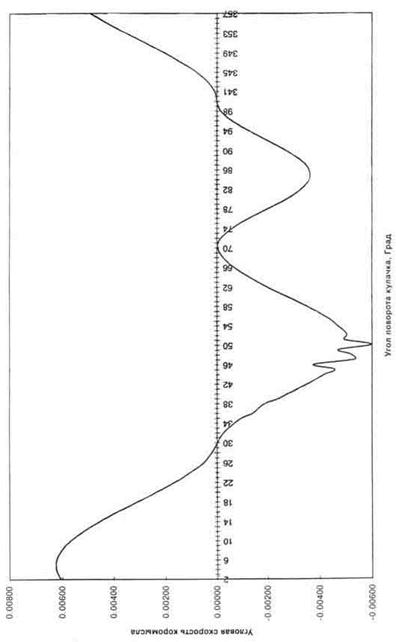

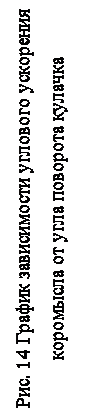
Эти погрешности в виде резких скачков особенно проявляются на графиках скоростей и ускорений коромысла AO2D.
Последовательно с кулачково-коромысловым механизмом соединен четырехзвенный О2АВО3 механизм, ведущим звеном которого является коромысло кулачкового механизма (рис. 11).
Для четырехзвенного механизма О2АВО3 примем систему координат, в которой оси X, Y направим через шарниры О2 и О3 (как показано на рис. 11). Углы поворота звеньев О2А и О3В будем отсчитывать в направлении против часовой стрелки.
Обозначим: О2А = a, АВ = b , О3В = c ,O3K = n , О2К = m , угол поворота, скорость и ускорение звена О2А через Y, ω1, ε1, а угол поворота, скорость и ускорение звена О3В через Θ, ω3, ε3.
Составим аналитические зависимости для последующих расчетов на ЭВМ между углами поворота, скоростями и ускорениями ведущего O2A и ведомого О3В звеньев четырехзвенного механизма. Спроектируем звенья механизма на оси X и Y и найдем координаты точек А и В.
XA = O3K + O2A cosY = n + a cosY(13)
YA = O2K + O2A sinY = m + a sinY(14)
XB = O3B . cosΘ = c cosΘ(15)
YB = O3B . sinΘ = c sinΘ(16)
Расстояние между точками А и В найдется:
b2 = (XA – XB)2 + (YA – YB)2(17)
Подставив в выражение (17) выражения (13), (14), (15), (16) получим:
b2 = (n + a cosY – c cosΘ)2 + (m + a sinY – c sinΘ)2(18)
Преобразуем полученное выражение (18) относительно угла φ. Для этого раскроем скобки и выполним приведение подобных членов.
b2 = n2 + a2cos2Y + c2cos2Θ + 2an cosY – 2nc cosΘ –2ac cosY + m2 +
+ a2sin2Y + c2sin2Θ + 2am sinY – 2mc sinΘ – 2ac sinΘ sinY
Или
b2 = –2c(n + a cosY)cosΘ – 2c(a sinY – m)sinΘ +
+ 2a(n cosY – m sinY) + a2 + c2 + n2 + m2(19)
Перенося в правую часть " " получим выражение для неявной функции, которую обозначим:
F(Y,Θ) = –2с(n + a cosY)cosΘ – 2c(m – a sinY)sinΘ +
+ 2a(n cosY – m sinY) + a2 – b2 + c2 + n2 + m2(20)
Обозначим через:.
A1 = –2c(n + a cosY)
A2 = –2c(–m + a sinY)
A3 = – [2a(n cosY – m sinY) + a2 – b2 + c2 + n2 + m2]
и запишем выражение для F(Y,Θ) в следующем виде:
F(Y,Θ) = A1 cosΘ + A2 sinΘ + A3(21)
Решение уравнения (21) запишем в виде выражений для тригонометрических функций двух углов, что удобно при расчете на ЭВМ.
|
|
|
|
значения угла Θ находятся в виде обратной тригонометрической функции
|
|
|
Для принятой системы отсчета углов перед корнем принимается знак " + ". Дифференцируя неявную функцию F(Y,Θ) находим зависимость между угловыми скоростями звеньев О2А и О3В, т. е. между ω1 и ω3.

|
|
|
ω3 = Kω3 . ω1(25)
Для нахождения аналога Kω3 угловой скорости продифференцируем по углу Y выражение (20).
|
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды