Проектирование системы оптимального корректирующего устройства
Линейная часть системы такова, что выполняется гипотеза фильтра, то есть график ЛАЧХ линейной части системы состоит из асимптот с наклоном не менее -20 дБ/дек. Следовательно, выходной сигнал нелинейного элемента раскладывается в ряд Фурье и рассматривается только первая гармоника разложения.
Таким образом:
 .
.
Рассчитаем ЭККУ, причем параметры нелинейности примем ![]() ,
, ![]() , а коэффициент усиления учтем при построении годографа Найквиста:
, а коэффициент усиления учтем при построении годографа Найквиста:
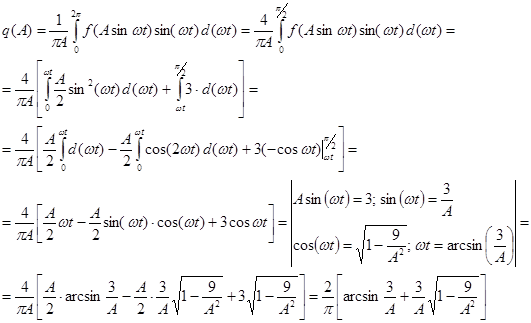
Таким образом, ЭККУ нелинейного элемента:
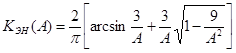 .
.
Исследуем возможность возникновения автоколебаний в замкнутой системе с помощью частотного метода. Для этого на одной координатной плоскости (рис. 4.6) изобразим годограф Найквиста (АФЧХ разомкнутой системы из п.1.4.1) и годограф ЭККУ (инверсный ЭККУ взятый с обратным знаком):
![]() ,
,
 .
.

Рис. 4.6. Годографы Найквиста и ЭККУ
Из рис. 4.6 видно, что годографы Найквиста и ЭККУ не пересекаются, следовательно, возможности возникновения автоколебаний в системе нет.
4.3 Отработка гармонических сигналов
Построим реакции системы с учетом насыщения в УМ по выходу УМ (рис. 4.7) и по выходу ДОС (рис. 4.8) на гармонический входной сигнал с амплитудой 1 В, 3 В и 5 В, и с частотой ![]()
![]() . Построение выполнено в программе VisSim.
. Построение выполнено в программе VisSim.
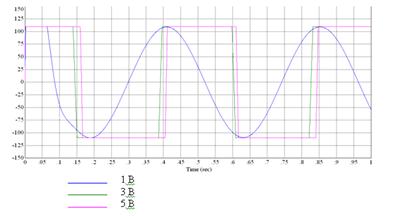
Рис. 4.7. Реакции системы по выходу УМ на гармонический сигнал
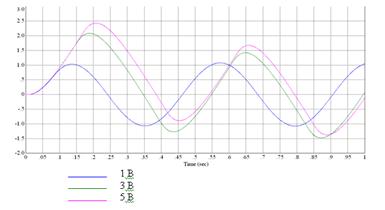
Рис. 4.8. Реакции системы по выходу ДОС на гармонический сигнал
Рассчитаем амплитудно-фазовые искажения по выходу ДОС и сравним их со значениями, полученными в п.2.3.3 (табл. 4.3).
Таблица 4.3
|
Без учета нелинейности |
С учетом нелинейности | |||
|
А = 1 В |
А = 3 В |
А = 5 В | ||
|
|
0,701 |
0,642 |
6,472 |
9,525 |
|
|
16,23 |
16,232 |
85,217 |
102,261 |
При подаче на вход гармонического сигнала с амплитудой А = 1 В, система работает в зоне линейности УМ и амплитудно-фазовые искажения близки значениям полученным при исследовании линейной системы. При увеличении амплитуды входного сигнала система работает в зоне нелинейности УМ, вследствие чего сигнал на выходе заметно искажен по амплитуде и по фазе, что заметно ухудшает работу системы.
ЗАКЛЮЧЕНИЕ
В результате проделанной работы произведен расчет корректирующего устройства, удовлетворяющего заданной совокупности требований, а также обеспечивающего рациональную структуру системы и установление оптимальных величин параметров ее отдельных звеньев.
Соответствие характеристик рассчитанной системы, требованиям технического задания приведено в табл. 4.5.
Таблица 4.5
|
Амплитудно-фазовые искажения | ||||
|
|
0…0,15 |
0,15…0,5 |
0,5… 1,3 | |
|
|
0,942 |
3,142 |
8,168 | |
|
Заданные значения |
|
0,1 |
0,4 |
2,5 |
|
|
3 |
5 |
16 | |
|
Расчетные значения |
|
0,009 |
0,095 |
0,417 |
|
|
0,624 |
2,262 |
7,653 | |
|
Показатель колебательности | ||||
|
Заданное значение |
|
1,25 | ||
|
Расчетное значение |
1,113 | |||
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Бесекерский, В.А. Теория систем автоматического регулирования: монография / В.А. Бесекерский, Е.П. Попов. – 3-е изд., испр. – М.: Наука, 1975. – 768 c.
2. Макаров, И.М. Линейные автоматические системы: учебное пособие / И.М. Макаров, Б.М. Менский. – 2-е изд., перераб. и доп. – М.: Машиностроение, 1982. – 504 c.
3. Зырянов, Г.В. Динамический синтез систем автоматического управления: учебное пособие / Г.В. Зырянов, А.А. Кощеев. – Челябинск: ЮУрГУ, 2001. – 40 c.
4. Павловская, О.О. Теория автоматического управления: учебное пособие / О.О. Павловская, Е.В. Плотникова. - Челябинск: ЮУрГУ, 2000. – 60 c.
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем