Определение фактических навигационных элементов на контрольном этапе
Для получения необходимой точности нужно произвести несколько определений угла сноса и курса самолета. Результаты нескольких измерений осреднить. В зависимости от вертикального угла и бокового уклонения рассчитать угол сноса.
Описанный способ применяется ночью и на больших высотах, при отсутствии болтанки, а также при использовании визиров, при помощи которых нельзя определить угол сноса об
ратным визированием.
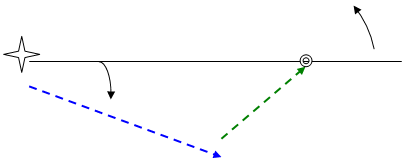
-Определение угла сноса двухкратным пеленгованием визирной точки
Определение угла сноса двухкратным пеленгованием визирной точки заключается в том, что на некотором вертикальном угле под курсовым углом 45° или 315° выбирается визирная точка. Когда визирная точка вторично окажется на том же вертикальном угле, вторично определяется ее курсовой угол.
Угол сноса рассчитывается по формуле:
УС = (КУ2 - 135) / 2
при визировании с правого борта или
УС = (КУ2 - 225) / 2
при визировании с левого борта,
где КУ2 — курсовой угол при втором визировании.
Как правило, этот способ применяется при полетах ночью и над морем, причем в тех случаях, когда нельзя измерить УС обратным визированием или по бегу земных ориентиров. При определении угла сноса визир устанавливается на курсовой угол 45°, если визирная точка с правого борта, или на курсовой угол 315°, если она с левого борта.
Промер угла сноса следует выполнять после того, как летчик установит заданный режим полета и картушка компаса успокоится. Небольшими поворотами барабана вертикальных углов, не меняя установленного курсового угла (45° или 315°), привести характерную визирную точку в центр пузырька уровня. После этого вращение барабана прекратить.
Вращением визира в пяте удерживать визирную точку на курсовой черте.
Сначала выбранная визирная точка отойдет от пузырька уровня, а затем, когда самолет пройдет траверс точки, она снова станет перемещаться к пузырьку. Вращением визира в пяте необходимо привести визирную точку в пузырек уровня.
В момент прихода визирной точки в центр пузырька произвести отсчет показания компаса и курсового угла при втором визировании и рассчитать угол сноса но указанным выше формулам.
Точность определения угла сноса данным способом 2—3°.
3. Определение угла сноса с использованием АРК
Автоматический радиокомпас (АРК.) — бортовое приемное устройство направленного действия, позволяющее определять направление на передающую радиостанцию. АРК совместно с наземными приводными и радиовещательными станциями образует угломерную систему самолетовождения.
При использовании радиокомпаса для самолетовождения экипажу необходимо знать следующие данные о приводных и радиовещательных станциях; место расположения (координаты); частоту работы и позывные; вид передачи; время работы и мощность.
Полёт от радиостанции в заданном направлении может быть выполнен в том случае, если она расположена на ЛЗП или её продолжении.
Контроль пути в полёте выполняют сравнением МПС с ЗМПУ.
В результате определяют боковое уклонение ВС от ЛЗП. Если МПС = ЗМПУ или отличается не более чем на 2°, то ВС находится на ЛЗП, если МПС больше ЗМПУ, то ВС находится правее ЛЗП, а если меньше — левее. Боковое уклонение и фактический угол сноса определяют по формулам:
БУ = МПС-ЗМПУ;
УСф = МПС-МК,
УСф = КУР -180°.
Магнитный пеленг
ВС МПС = МК+КУР±180°.
В практике МПС определяют по упрощенной формуле
МПС = МК±α,
где α = КУР— 180°. Знак «плюс» берется, если КУР>180°, знак «минус», если КУР<180°. При КУР=180° МПС = МК.
Пример. ЗМПУ=124°; МКР=135°; КУР=175°. Найти МПС, БУ и УСф. Решение. I. МПС = МК±α = 135°-5° = 130°.
2. БУ = МПС - ЗМПУ = 130° - 124° = + 6°.
3. УСф = КУР-180° = 175°- 180°= -5° или УСФ = МПС-МКР= 130°-135° = -5°.

Выполняя контроль пути по направлению с помощью АРК, следует учитывать, что радиопеленги определяют с погрешностями. Поэтому при равенстве МПС = ЗМПУ нельзя с полной уверенностью утверждать, что ВС находится на ЛЗП. В этом случае данное равенство всего лишь означает, что такое положение ВС наиболее вероятно, хотя в действительности оно может оказаться в стороне от ЛЗП.
При значительном уклонении ВС от ЛЗП, а также в случаях, когда необходимо строго следовать по ЛЗП, применяется полёт от радиостанции с выходом на ЛЗП.
Порядок выполнения полёта следующий:
точно проходят радиостанцию с МКр; через 5—15 мин полета отсчитывают КУР и рассчитывают
МПС = МК+КУР± 180°
или МПС = МК±α;
определяют сторону и значение бокового уклонения
БУ = МПС —ЗМПУ;
УСФ = КУР — 180°;
задаются углом выхода (20—90°), рассчитывают МКвых и выводят ВС на ЛЗП; МКи= ЗМПУ±УВЫХ (« + » при левом уклонении, «—» при правом уклонении) ; определяют момент выхода ВС на ЛЗП по КУРвых\= 180°±Увых (« -\- » при правом уклонении, « — » при левом уклонении); после выхода на ЛЗП устанавливают ВС на МК™ = МКР — ( ±БУ) или МКс-л = ЗМПУ — ( ±УСф); при полете по ЛЗП ведут контроль пути по направлению по КУРсп или МПСС.П: КУРст = 180° + (=ь УСФ); МПСС1 = = ЗМПУ.
 | |||

![]() ЗМПУ
ЗМПУ
![]() МПС
МПС
 | |||
 | |||
Пример. ЗМПУ = 90°; МКр = 88°; КУР=188°; Увых = 30ۨ. Определить данные для выхода и полета по ЛЗП.
Решение I. Находим МПС = МК±α = 88° + 8° =96°; БУ=МПС-ЗМПУ 96°-90°= +6°; УСф = КУР-180ۨ=188ۨ-180ۨ = +8°.
2. Рассчитываем МКвых = ЗМПУ±Увых = 90ۨ-30ۨ = 60°; КУРвых = 180°±Увых= 180+ 30° = 210°
3 Находим МКсл = МКр-(±БУ)=88°-( + 6°) = 82°. КУРСЛ= 180° + (±УСф) 180° + ( + 8°)=188°.
4. Определение путевой скорости./W/
Другие рефераты на тему «Транспорт»:
- Использование сетевой модели для оптимизации процесса ремонта тележек пассажирского тепловоза ТЭП60
- Расчет производственной программы по техническому обслуживанию и ремонту автомобилей
- Назначения и особенности конструкции гондол и пилонов самолета
- Реконструкция зерноочистительной машины
- Расчет карданной передачи автомобиля ГАЗ-2410
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск