Расчет пути и времени обгона
где ![]() и
и ![]() - эмпирические коэффициенты, зависящие от типа обгоняемого автомобиля, их значения приведены в таблице 1.1.
- эмпирические коэффициенты, зависящие от типа обгоняемого автомобиля, их значения приведены в таблице 1.1.
Вторая дистанция безопасности короче первой, так как водитель обгоняющего автомобиля стремиться быстрее возвратиться на свою полосу
движения и иногда «срезает угол». Кроме того, скорость V1 обгоняющего автомобиля больше скорости V2 обгоняемого, поэтому если в момент завершения обгона дистанция между автомобилями и окажется короче допустимой, то она очень быстро увеличится. После проведённых расчётов необходимо построить график и схему обгона (рисунок 1.1), считая движение обоих автомобилей равномерным, и соответствующим зависимости S=S(t). Эта зависимость представляет собой прямые линии 1 и 2 соответственно для обгоняющего и обгоняемого автомобилей.
В начале обгона расстояние между передними частями обгоняющего и обгоняемого автомобилей равно D1+L2. Точка А пересечения прямых 1 и 2 характеризует момент обгона, в который оба автомобиля поравнялись (время tA)после чего обгоняющий автомобиль начинает выходить вперед. Чтобы определить минимально необходимые время и путь обгона, нужно найти на графике такие две точки В и С на линиях 1 и 2, расстояние между которыми по горизонтали было бы равно сумме D1+L2. Тогда абсцисса точки В определит путь обгона, а ордината - время обгона.
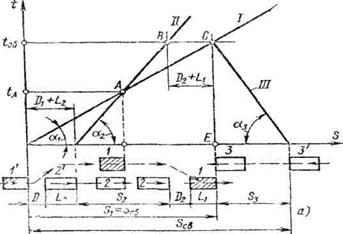
Рисунок 1.1 - Характеристики обгона при равномерном движении обгоняющего и обгоняемого автомобилей.
Определяем минимальное расстояние Sсв1, которое должно быть свободным перед обгоняющим автомобилем в начале обгона:
 (1.8)
(1.8)
![]() м.
м.
или с учётом (1.4):
![]() (1.9)
(1.9)
где Sз и V3 - путь и скорость встречного автомобиля, м/с.
Скорость встречного автомобиля в действительных условиях движения практически невозможно определить с высокой степенью точности и водитель, как правило, определяет её на основе своего опыта интуитивным путём. Для расчётов же примем следующую её зависимость от скорости обгоняющего автомобиля:
![]() (1.10)
(1.10)
![]() м/c
м/c
После проведения расчётов и построения на их основе соответствующих зависимостей необходимо проанализировать, какие факторы влияют на путь и время обгона, а также условия движения, в которых возможен и практикуется такой маневр.
1.2 Расчёт пути и времени обгона с возрастающей скоростью
Обгон с возрастающей скоростью характерен при высокой интенсивности движения при движении сплошным потоком. В этих условиях быстроходный автомобиль, догнав медленно движущийся автомобиль, уменьшает скорость, и некоторое время движется позади него с той же скоростью. Водитель заднего автомобиля внимательно следит за потоком и при появлении перед обгоняемым автомобилем достаточного свободного расстояния начинает обгон, сочетая его с разгоном. Для того чтобы путь и время обгона были минимальными, интенсивность разгона должна быть максимально возможной.
Для расчета пути и времени обгона с возрастающей скоростью необходимо вначале построить график интенсивности разгона, характеризующий зависимость между путем и временем движения обгоняющего автомобиля при максимально возможном ускоренном движении.
Для построения указанного графика нужно предварительно произвести расчёт динамической характеристики (зависимость динамического фактора от скорости движения), а затем определить зависимость ускорения обгоняющего автомобиля от скорости движения V1.
Динамический фактор определяется по формуле:
 , (1.11)
, (1.11)
![]()
где Рm- сила тяги, Н;
Рв - сила сопротивления воздуха, Н;
Ga - вес автомобиля, Н (Ga = gma);
Ме - крутящий момент двигателя, Н-м;
Ик - передаточное число коробки передач (для каждой i-ой передачи имеет своё значение);
И0 - передаточное числа главной передачи;
![]() - механический коэффициент полезного действия трансмиссии;
- механический коэффициент полезного действия трансмиссии;
rк - радиус колеса, м;
к - коэффициент обтекаемости, Н-с2/м4;
F- лобовая площадь, м2;
Va - скорость автомобиля, м/с.
Эффективный крутящий момент двигателя определяется по следующей зависимости:
 (1.12)
(1.12)

где Nmax - максимальная мощность двигателя, кВт;
а, b, с - эмпирические коэффициенты (для бензиновых двигателей a=0,8, b=1, с=0,9; для дизельных а=0,53; 6=1,56; с=1,05);
ne - частота вращения двигателя при расчётной скорости на соответствующей ей передаче, мин" ;
nn - частота вращения, соответствующая максимальной мощности, мин-1 .
Обороты, на которых работает двигатель, ne, мин-1 , следует задавать для расчётов в диапазоне [0,1nn;nn], принимая соответствующий шаг для 8 . 10 значений, при выполнении обязательного условия nemin > 600 мин-1.
Скорость движения автомобиля рассчитываем по выражению:
![]() (1.13)
(1.13)
Таблица 1.2 - Значения коэффициента полезного действия для различных трансмиссий
![]()
Значения коэффициента полезного действия, ![]() принимаются по таблице 1.2.
принимаются по таблице 1.2.
|
Тип транспортного средства |
Значение коэф-та |
|
Легковые |
0,92-0,9 |
|
Двухосные грузовые и автобусы с одинарной главной передачей |
0,90-0,88 |
|
Двухосные грузовые и автобусы с двойной главной передачей, а также автомобили повышенной проходимости (4x4) |
0,88-0,85 |
|
Трехосные грузовые и автобусы (6x4) |
0,86-0,83 |
|
Грузовые (6x6) |
0,85-0,83 |
Если расчёт ведется для автопоезда, следует учитывать, что динамический фактор автопоезда корректируется с учётом массы прицепа:
Другие рефераты на тему «Транспорт»:
- Двигатели внутреннего сгорания
- Разработка годового плана работы подвижного состава на отделении дороги
- Совершенствование международных автомобильных и контейнерных грузоперевозок в направлении Берлин – Москва
- История создания автомобиля ГАЗ-69
- Проект модернизации одноковшового экскаватора с целью повышения производительности и экономической эффективности
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск