Анализ погрешностей спутниковой радионавигационной системы, работающей в дифференциальном режиме
· обеспечить доведение координат ИСЗ (эфемерид) до каждого потенциального потребителя навигационной информации;
· обеспечить доведение до всех потребителей шкалы единого времени и синхронизацию работы всех включенных в систему ИСЗ.
Прежде чем рассмотреть варианты решения перечисленных проблем, остановимся на некоторых положениях космической баллистики для оценки характеристик траекторий
движения ИСЗ.
Для длительного существования ИСЗ как небесного тела ему необходимо придать скорость, превышающую так называемую первую космическую скорость. Эта скорость равна, примерно, 7.8 км/с (при малых высотах спутника) и обеспечивает движение по круговой орбите; при увеличении скорости орбита становится эллиптической, причем эксцентриситет эллипса растет с ростом скорости. Величина первой космической скорости уменьшается при возрастании высоты ИСЗ над земной поверхностью, что приводит к увеличению времени обращения спутника вокруг Земли. Для круговой орбиты высотой Н период обращения Т характеризуется следующими выборочными значениями:
Н = 250 км, Т = 89 мин; H = 1000 км, Т = 96 мин;
Н = 20240 км, Т = 12 час; Н = 35870 км, Т = 24 час.
1.2 Описание движения спутников
Координаты и составляющие вектора скорости спутников меняются очень быстро. Поэтому сообщения о параметрах движения спутников содержат сведения не об их координатах, а информацию о параметрах некоторой модели, аппроксимирующей траекторию движения ИСЗ на достаточно большом интервале времени (примерно 1 час). Параметры аппроксимирующей модели меняются достаточно медленно, и их можно считать постоянными на интервале аппроксимации. Состав параметров аппроксимирующей модели определяет и состав навигационных сообщений спутников. Поэтому модель движения, принимаемая в системе для расчета траекторий движения ИСЗ, является одним из основных понятий, необходимых для изложения принципов ее функционирования [3].
Самой простой моделью движения ИСЗ является кеплеровская модель. В этой модели учитывается единственная сила притяжения, образуемая центральным полем тяготения Земли. Движение ИСЗ, задаваемое кеплеровской моделью, происходит в фиксированной плоскости. Текущие полярные координаты ИСЗ в этой плоскости R(t) и ![]() связаны между собой и с параметрами кеплеровской траектории р и е следующим образом:
связаны между собой и с параметрами кеплеровской траектории р и е следующим образом:
![]() (1.1)
(1.1)
где R(t) – расстояние;
![]() - фокальный параметр;
- фокальный параметр;
е – эксцентриситет;
![]() - угол, называемый истинная аномалия.
- угол, называемый истинная аномалия.
Текущие координаты R(t) и ![]() образуют вектор
образуют вектор ![]() называемый радиус-вектор ИСЗ.
называемый радиус-вектор ИСЗ.
Для определения положения ИСЗ в каждый момент времени необходимо найти связь между истинной аномалией ![]() и временем t. В кеплеровской модели такая связь задается уравнением Кеплера, которое для эллиптической орбиты имеет вид:
и временем t. В кеплеровской модели такая связь задается уравнением Кеплера, которое для эллиптической орбиты имеет вид:
 (1.2)
(1.2)
где ![]() - момент времени прохождения ИСЗ через перигей орбиты;
- момент времени прохождения ИСЗ через перигей орбиты;
![]() - большая полуось эллипса;
- большая полуось эллипса;
![]() - гравитационный параметр Земли;
- гравитационный параметр Земли;
![]() - эксцентрическая аномалия (промежуточная величина, тоже угол).
- эксцентрическая аномалия (промежуточная величина, тоже угол).
Решив последнее уравнение относительно ![]() для заданного момента времени
для заданного момента времени ![]() , значение
, значение ![]() находится по формуле:
находится по формуле:
![]() (1.3)
(1.3)
Если элементы ![]() ,
, ![]() ,
, ![]() дополнить величинами, характеризующими положение плоской орбиты относительно неподвижной геоцентрической системы координат Oxyz, то такая совокупность величин будет полностью определять кеплеровское движение ИСЗ.
дополнить величинами, характеризующими положение плоской орбиты относительно неподвижной геоцентрической системы координат Oxyz, то такая совокупность величин будет полностью определять кеплеровское движение ИСЗ.
В качестве параметров кеплеровской орбиты (кеплеровских элементов орбиты) наиболее часто используется следующая совокупностьвеличин (см. рисунок 1.1):
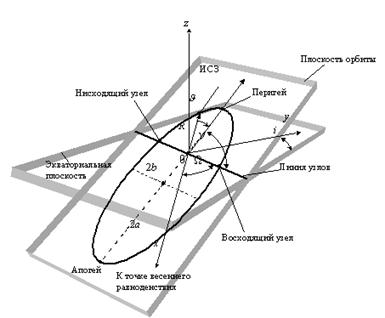
Рисунок 1.1 - Орбита спутника Земли и ее элементы
· наклонение плоскости орбиты относительно плоскости экватора – i;
· прямое восхождение (или долгота) восходящего узла орбиты – Ω;
· угловое расстояние перигея орбиты от восходящего узла (аргумент перигея) υ;
· эксцентриситет орбиты - с;
· большая полуось эллипса – а
· время прохождения спутника через перигей орбиты - tп
Еще раз отметим, что указанная шестимерная совокупность параметров орбиты позволяет рассчитать координаты ИСЗ в любой момент времени в геоцентрической экваториальной системе координат Oxyz или любой другой, связанной с ней аналитическими зависимостями. В свою очередь, элементы орбиты рассчитываются по измененной шестимерной характеристике движения ИСЗ по орбите в определенный момент времени. Такой характеристикой могут быть три координаты и три проекции вектора скорости. Измерение характеристик движения, расчет элементов орбиты и передачу последних на борт навигационных ИСЗ для ретрансляции потребителям осуществляет система орбитальных измерении, состоящая из сети измерительных пунктов и координационно-вычислительного центра.
1.3 Навигационные определения
В СРНС второго поколения применяется дальномерно-доплеровский метод. В среднеорбитальных дальномерно-доплеровских СРНС определяются местоположение, величина и направление вектора скорости потребителя в любой момент времени и в любой точке на поверхности Земли и околоземного пространства. Для этого в системе обеспечивается одновременная связь потребителя не менее чем с четырьмя спутниками. Все спутники ведут синхронное излучение дальномерных сигналов (ошибки синхронизации малы и не превышают 10-20 нс). В аппаратуре потребителя измеряется задержка спутникового сигнала относительно меток времени местной шкалы, вырабатываемых в аппаратуре потребителя. Эта задержка складывается из задержки сигналов при распространении в пространстве и разницы хода часов на спутниках и аппаратуре потребителя. Произведение этой суммарной задержки на скорость распространения сигнала принятого называть псевдодальностью.
Обозначим координаты потребителя на момент приема через ![]() , а координаты j-го спутника на момент времени, предшествующий моменту приема на время распространения, - через
, а координаты j-го спутника на момент времени, предшествующий моменту приема на время распространения, - через ![]() . Тогда можно составить следующую систему нелинейных уравнений:
. Тогда можно составить следующую систему нелинейных уравнений:
Другие рефераты на тему «Коммуникации, связь и радиоэлектроника»:
- Применение магнетронных генераторов большей мощности в радиолокационных системах
- Оптические системы передачи
- Электронные пушки с большим пространственным зарядом
- Подготовка к разработке техпроцесса сборки электронно-оптических систем
- Разработка системы управления многосвязных систем автоматического регулирования исполнительного уровня
Поиск рефератов
Последние рефераты раздела
- Микроконтроллер системы управления
- Разработка алгоритмического и программного обеспечения стандарта IEEE 1500 для тестирования гибкой автоматизированной системы в пакете кристаллов
- Разработка базы данных для информатизации деятельности предприятия малого бизнеса Delphi 7.0
- Разработка детектора высокочастотного излучения
- Разработка микропроцессорного устройства для проверки и диагностики двигателя внутреннего сгорания автомобиля
- Разработка микшерного пульта
- Математические основы теории систем