Моделирование нагрева асинхронного двигателя
Таблица 3.1 – Значения η и cosφ для двигателя марки 4А132М2У3
|
Р2/Р2ном |
0,25 |
0,5 |
0,75 |
1 |
|
|
Р2, кВт |
2,75 |
5,5 |
8,25 |
11 |
13,75 |
|
η, % |
80 |
87 |
88 |
88 |
87 |
|
cosφ |
0,65 |
0,82 |
0,87 |
0,9 |
0,9 |
Аналогично интерполируются значения коэффициента полезного действия. На рисунке 3.4 приведен график, полученный сплайн-интерполяцией дискретных значений cosφ, приведенных в таблице 3.1, для двигателя марки 4А132М2У3. Узловые точки обозначены крестиками.
Рисунок 3.3 – График зависимости η от нагрузки P2, полученный сплайн-интерполяцией
Блок «P2» (см. рисунок 3.2) обозначает вход подсистемы, блоки «Pm» и «Pst» – выходы.
Блоки «Poteri v medi» и «Poteri v rotore» представляют собой блоки задания алгебраических функций и служат для определения потерь в меди и роторе по выражениям (2.98)
![]()
и (2.101)
![]() .
.
Блок «Mehanicheskie poteri» представляет собой источник постоянного воздействия с величиной Pмех. Он предназначен для моделирования механических потерь в двигателе. Блоки «Ground», «Relational operator» и «Product1» служат для того, чтобы при отсутствии нагрузки Р2 механические потери Pмех были равны нулю. Величина нагрузки Р2 на элементе сравнения «Relational operator» сравнивается с нулевым значением. Если нагрузка равна нулю, то на выходе элемента сравнения сигнал отсутствует, если не равна нулю, то на выходе элемента сравнения появляется единица. Блок «Product1» перемножает мощность на валу с выходным значением элемента сравнения. При умножении Рмех на единицу на выходе блока «Product1» имеем величину механических потерь. При умножении Рмех на ноль на выходе блока «Product1» сигал равен нулю.
Блоки «Gain1» и «Gain2» имеют коэффициент усиления, равный A_rot и B_rot соответственно, и обеспечивают умножение значения потерь в роторе Pрот на коэффициенты, присутствующие в выражениях (2.18)
![]()
и (2.19)
![]() .
.
Коэффициенты усиления A_rot и B_rot рассчитываются в теле m-файла.
Подсистема «Tok statora» рассчитывает значение тока статора по выражению (2.100)
 .
.
Структурная схема подсистемы приведена на рисунке 3.5.
В блоке «Tok» (см. рисунок 3.5) значение мощности на валу P2 делится на фазное напряжение U1 и количество фаз статора m1 в соответствии с выражением (2.100). Блок «Product2» делит полученное промежуточное значение на коэффициент мощности cosφ и коэффициент полезного действия η. В итоге на выходе получаем значение тока статора I1.
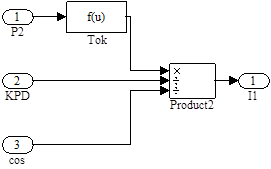
Рисунок 3.5 – Структурная схема подсистемы «Tok statora»
Подсистема «Tok rotora» (см. рисунок 3.2) рассчитывает значение тока ротора по выражению (2.106)
![]() .
.
Структурная схема подсистемы приведена на рисунке 3.6.
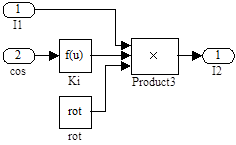
Рисунок 3.6 – Структурная схема подсистемы «Tok rotora»
Блок «Ki» (см. рисунок 3.6) представляет собой блок задания алгебраической функции, в котором рассчитывается коэффициент, учитывающий влияние тока намагничивания и сопротивления обмоток на отношение I1/I2, по выражению (2.107)
![]() .
.
В блоке «Rot» задается величина коэффициента приведения токов νi, рассчитанного в теле m-файла по выражению (2.108)
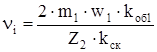 .
.
Блок «Product3» перемножает значения тока статора I1, коэффициента приведения токов νi и коэффициента ki, учитывающего влияние тока намагничивания и сопротивления обмоток на отношение I1/I2. В итоге на выходе имеем значение тока ротора I2.
Подсистема «Summarnye poteri» (см. рисунок 3.2) рассчитывает суммарные потери в двигателе по выражению (2.110)
 .
.
Структурная схема подсистемы приведена на рисунке 3.7.
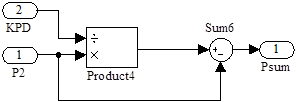
Рисунок 3.7 – Структурная схема подсистемы «Summarnye poteri»
Блок «Product4» делит значение мощности на валу двигателя P2 на коэффициент полезного действия η. На выходе «Product4» получается значение потребляемой из сети мощности P1, из которого в сумматоре «Sum6» вычитается величина мощности на валу двигателя Р2. В итоге на выходе подсистемы имеем значение суммарных потерь в двигателе РΣ.
Подсистема «Dobavochnye poteri» рассчитывает величину добавочных потерь в двигателе по выражению (2.113)
 .
.
Структурная схема подсистемы приведена на рисунке 3.8.
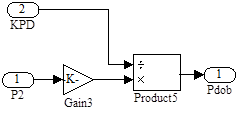
Рисунок 3.8 – Структурная схема подсистемы «Dobavochnye poteri»
Усилительный элемент «Gain3» имеет коэффициент усиления равный 0,005. Значение с выхода усилительного элемента в блоке «Product5» делится на величину коэффициента полезного действия η. В итоге на выходе подсистемы имеем значение добавочных потерь в двигателе Рдоб.
Структурная схема для определения температуры стали приведена на рисунке 3.9. Практически все блоки идентичны блокам структурной схемы для определения температуры меди, отличие состоит в том, что в блоки передаточных функций «Cu», «Fe», «Cu(0)», «Fe(0)» и «Air» входят коэффициенты выражения (3.17).
Оценить точность полученной модели можно, сравнив результаты моделирования с данными, полученными опытным путем. Но проведение опытов является невозможным из-за отсутствия достаточной материально-технической базы, а так же из-за малого количества времени, отведенного на выполнение дипломного проекта. Приводимые в известной литературе кривые изменения температуры двигателя показывают лишь характер ее изменения и никакой точной информации не несут. Поэтому, единственным доступным в данной ситуации способом оценки достоверности результатов моделирования является сравнение их с результатами, полученными другими существующими методами тепловых расчетов. Так, например, при тепловом расчете асинхронного двигателя хакрытого исполнения мощностью Р2=7,5 кВт с синхронной скоростью n1=1500 об/мин в установившемся режиме по методике приведенной в [13] превышение температуры обмотки равно Δθм=75,30С. При расчете с помощью приведенной выше модели для того же двигателя получено значение Δθм=73,50С. Таким образом разница полученных значений превышения температуры обмотки статора составляет 1,80С, то есть 2,4%, что вполне удовлетворительно.
Другие рефераты на тему «Физика и энергетика»:
Поиск рефератов
Последние рефераты раздела
- Автоматизированные поверочные установки для расходомеров и счетчиков жидкостей
- Энергосберегающая технология применения уранина в котельных
- Проливная установка заводской метрологической лаборатории
- Источники радиации
- Исследование особенностей граничного трения ротационным вискозиметром
- Исследование вольт-фарадных характеристик многослойных структур на кремниевой подложке
- Емкость резкого p-n перехода