Преобразование и расчет характеристик математических моделей объекта управления
![]()
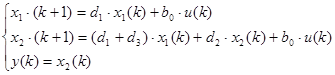
Полученные разностные уравнения приведём к нормальному виду:
Найдём матрицы этого уравнения:
![]() ,
, ![]() ,
, 23 src="images/referats/5444/image127.png">,
![]() .
.
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
5.4 Текст программы
k=2;t1=1;t2=10;t0=1
wtf=tf(k,[t1*t2 (t1+t2) 1])
wzpk=zpk(wtf)
ps=ss(wtf)
wtfd=c2d(wtf,t0)
wzpk=zpk(wtfd)
psd=c2d(ps,t0)
An=[-1/t1 0;1/t2 -1/t2]
Bn=[k/t1;0];
C=[0 1]
D=0
psr=ss(An,Bn,C,D)
wtfr=tf(psr)
d1=exp(-t0/t1)
d2=exp(-t0/t2)
b0=k*(t2*(1-d2)-t1*(1-d1))/(t2-t1)
b1=k*(-t2*(1-d2)*d1+t1*(1-d1)*d2)/(t2-t1)
a1=-(d1+d2)
a2=d1*d2
wtfdr=tf([b0 b1],[1 a1 a2])
d3=b1/b0;k1=b0;
Ad=[d1 0;d1+d3 d2]
Bd=[k1;k1]
psdr=ss(Ad,Bd,C,D)
tfdr=tf(psdr)
Список использованных источников
1. Амосов А.А, Дубинский Ю.А., Копченова Н.В. Вычислительные методы для инженеров. – М.: Высш. шк., 1994. -55с.
2. Арсенин В.Я. Методы математической физики и специальные функции. – М.: Наука, 1984. – 382 с.
3. Артамонов Д.В., Семенов А.Д. Основы теории линейных систем автоматического управления. – Пенза: Изд-во Пензенского гос. ун-та, 2004. - 130 с.
4. Ван дер Варден Б. Л. Математическая статстика. –М.: Изд-во Иностр. лит., 1960. 434 с.
5. Вентцель Е.С. Овчаров Л.А. Теория вероятностей и ее инженерные приложения. – М.: Нака, 1988. - 408 с.
Другие рефераты на тему «Экономико-математическое моделирование»:
Поиск рефератов
Последние рефераты раздела
- Выборочные исследования в эконометрике
- Временные характеристики и функция времени. Графическое представление частотных характеристик
- Автоматизированный априорный анализ статистической совокупности в среде MS Excel
- Биматричные игры. Поиск равновесных ситуаций
- Анализ рядов распределения
- Анализ состояния финансовых рынков на основе методов нелинейной динамики
- Безработица - основные определения и измерение. Потоки, запасы, утечки, инъекции в модели