Преобразование и расчет характеристик математических моделей объекта управления
![]() . (1.6)
. (1.6)
Преобразовывая по Лапласу (1.6) и группируя подобные члены, получим выражение аналогичное (1.4).
![]()
![]() , (1.7)
, (1.7)
где ![]() - единична
- единична
я матрица.
Полагая ![]() , а
, а ![]() найдем взаимосвязь параметров структурированной модели и модели в пространстве состояний
найдем взаимосвязь параметров структурированной модели и модели в пространстве состояний
![]() ,
, ![]() ,
, ![]() . (1.8)
. (1.8)
По аналогии с одномерными системами, используя основные правила теории матриц, можно ввести понятие матрицы передаточной функции.
Если умножить (1.4) на обратную матрицу ![]() , то получим:
, то получим:
![]() (1.9)
(1.9)
Отсюда можно получить выражение для матриц передаточных функций системы по управлению
![]() (1.10)
(1.10)
и возмущению
![]() (1.11)
(1.11)
Как для одномерных, так и для многомерных систем одной и той же матрице передаточной функции может соответствовать несколько вариантов структурных схем и уравнений состояния.
Т.е. по уравнениям состояния матрица передаточной функции может быть получена однозначно, обратное утверждение будет неверным. Это связано с тем, что при получении выражения передаточной функции исключаются из рассмотрения все внутренние переменные структурированной модели, которые нельзя уже восстановить по выражению передаточной функции.
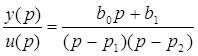
Пример 1.Пусть имеется передаточная функция звена, записанная в виде:
 . (1.12)
. (1.12)
Запишем ее через отрицательные степени оператора р.
 . (1.13)
. (1.13)
Введем вспомогательную переменную Е(р) равную
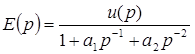 , (1.14)
, (1.14)
Или ![]() , (1.15)
, (1.15)
откуда нетрудно составить и структурную схему (рис. 1.1).

Рис. 1.1
Дифференциальные уравнения для переменных состояния могут быть легко найдены из рассмотрения структурной схемы системы.
 . (1.16)
. (1.16)
Разложим (1.12) на простейшие дроби, предполагая, что характеристическое уравнение звена имеет действительные корни p1 и p2 . Согласно теореме Виетта
![]() ,
, ![]() .
.
Тогда выражение передаточной функции примет следующий вид:
 , (1.17)
, (1.17)
где ![]() ,
,![]() .
.
Структурная схема следует из выражения передаточной функции непосредственно (рис. 1.2).
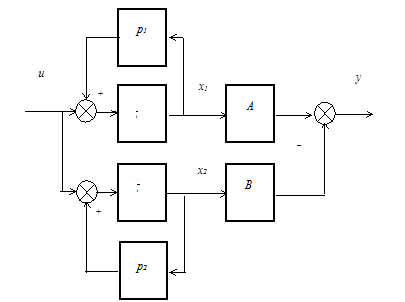
Рис. 1.2
Система дифференциальных уравнений теперь выглядит
 . (1.18)
. (1.18)
Если теперь записать (1.12) в виде произведения дробей, то получим следующее выражение
 (1.19)
(1.19)
Введем переменные состояния

 , тогда
, тогда
![]() .
.
Отсюда можно получить структурную схему (рис. 1.3) и уравнения в переменных состояния
 (1.20)
(1.20)

Рис. 1.3.
Сравнивая уравнения состояния (1.16), (1.18) и (1.20) и структурные схемы рис. 1.1 – 1.3, можно сделать вывод о том, что одной передаточной функции (1.12) могут соответствовать различные структуры и уравнения состояния. Такое многообразие структурных схем обусловлено выбором различных систем отсчета (базисов) для переменных состояния. Выбирая переменные состояния в различных координатных системах (базисах) можно получать и различные структурные схемы.
2. Непрерывные модели пространства состояния
Математическая модель (образ) представляет собой абстрактное отражение реального объекта (оригинала, прообраза). В зависимости от типа объекта и целей, ради которых строится и используется модель, формальное описание может быть различным. Для моделирования объектов могут быть использованы структурные схемы, операторные уравнения, алгебраические уравнения, дифференциальные, интегральные и интегро-дифференциальные уравнения, Марковские цепи, передаточные функции, частотные характеристики, весовые функции, графы и т. д. Все эти методы функционально связывают входные и выходные сигналы объекта. По количеству входов и выходов объекты и соответствующие им модели разделяют на одномерные и многомерные. Одномерными называют объекты, имеющие один вход и один выход, многомерными – объекты, имеющие несколько входов и выходов, причем число входов не обязательно равно числу выходов. Блок-схемы одномерного и многомерного объектов изображены соответственно на рис. 2.1,а и рис. 2.1,б. Причем число входов не обязательно равно числу выходов.
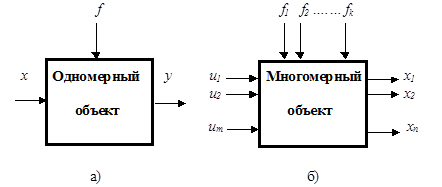
Рис. 2.1.
Наиболее полно объект описывается в терминах пространства состояний. Под состоянием объекта понимается совокупность величин xi, полностью определяющих его положение в данный момент времени.
Наиболее употребительной моделью динамических объектов являются дифференциальные уравнения. Будем рассматривать только объекты с сосредоточенными параметрами, которые описываются обыкновенными дифференциальными уравнениями. Порядок системы дифференциальных уравнений, описывающей модель объекта, непосредственно не определяется количеством входов и выходов, а зависит от операторов, преобразующих входные сигналы в выходные.
Для динамических систем, в которых физические процессы протекают непрерывно во времени, скорости изменения переменной состояния объекта можно также задать вектором
 , (2.1)
, (2.1)
где ![]() ,
, ![]() – скорости изменения компонент многомерной переменной состояния.
– скорости изменения компонент многомерной переменной состояния.
Другие рефераты на тему «Экономико-математическое моделирование»:
Поиск рефератов
Последние рефераты раздела
- Выборочные исследования в эконометрике
- Временные характеристики и функция времени. Графическое представление частотных характеристик
- Автоматизированный априорный анализ статистической совокупности в среде MS Excel
- Биматричные игры. Поиск равновесных ситуаций
- Анализ рядов распределения
- Анализ состояния финансовых рынков на основе методов нелинейной динамики
- Безработица - основные определения и измерение. Потоки, запасы, утечки, инъекции в модели