Технические средства организации дорожного движения
E) вызывные устройства; коммутируемые контроллеры; контроллеры непосредственного
подчинения жесткого и адаптивного управлений;
152
Детекторы транспорта предназначены для:
A) расчета программы управления дорожным движением
B) обнаружения транспортных средств и переключения сигналов
C) определения параметров транспортных потоков и переключения сигналов
D) обнаружения т
ранспортных средств и определения параметров транспортных потоков
E) нет правильного ответа
153
Детектор состоит из:
A) акустического усилителя; фотоэлектрического преобразователя; приемного устройства;
B) чувствительного элемента; электростатического экрана; ультразвукового преобразователя;
C) чувствительного элемента; усилителя-преобразователя; выходного устройства;
D) преобразователя фазового сдвига; выходного устройства; приемного устройства;
Е) импульсного преобразователя; блока питания; выходного устройства; чувствительного элемента;
154
По принципу действия чувствительных элементов детекторы транспорта делятся на три
группы:
A) непосредственного действия; с обратной связью; измеряющие параметры электромагнитных систем;
B) контактные; электромеханические; оптические;
C) механические; пьезоэлектрические; вакуумные;
D) контактные; излучения; измеряющие параметры электромагнитных систем;
E) пневматические; гидравлические; контактные; излучения;
155
Эффект Доплера используется при применении чувствительного элемента:
A) пьезоэлектрического
B) фотоэлектрического
C) ультразвукового
D) радарного
Е) электромеханического
156
Автомобиль регистрируется при обнаружении разницы в интервалах времени от момента посылки до приема импульсов, отраженных от автомобиля или дорожного покрытия, при применении чувствительного элемента:
A) ультразвукового
B) радарного
C) фотоэлектрического
D) пьезоэлектрического
E) электромеханического
157
Расстояние от чувствительного элемента детектора до стоп-линий определяется:
A) Sдт = (Vа tэк / 3.6) - (Vа / 26 ap)
B) Sдт = (Vа tрк / 7.2) + (Vа / 26 aт)
C) Sдт = (Vа tрк / 3.6) + (Vа / 26 ap)
D) Sдт = (Vа tэк / 7.2) - (Vа / 26 ap)
E) Sдт = (Vа tрк / 3.6) + (Vа / 26 aт)
158
Какие виды чувствительных элементов детектора транспорта закладывают под дорожное покрытие:
A) фотоэлектрический и индуктивный
B) магнитный и индуктивный
C) ультразвуковой и радарный
D) ультразвуковой и магнитный
E) электромеханический и пневмоэлектрический
159
При многорядном интенсивном движении автомобилей появляется погрешность измерений. Для какого чувствительного элемента это характерно:
A) пьезоэлектрического
B) фотоэлектрического
C) ультразвукового
D) радарного
E) электромеханического
160
Какой чувствительный элемент поляризует электрический заряд при механической деформации:
A) пьезоэлектрический
B) фотоэлектрический
C) ультразвуковой
D) радарный
E) электромеханический
161
Чувствительность к акустическим и механическим помехам является недостатком какого чувствительного элемента:
A) радарного
B) фотоэлектрического
C) ультразвукового
D) электромеханического
E) пьезоэлектрического
162
При наезде колес автомобиля на какой чувствительный элемент его контакты замыкаются и формируется электрический импульс:
A) пьезоэлектрический
B) пневмоэлектрический
C) электромеханический
D) ультразвуковой
E) фотоэлектрический
163
Из какого материала изготавливают электростатический экран чувствительного элемента
дорожного детектора:
А) алюминия
В) цинка
C) латуни
D) меди
E) никеля
164
Предупреждающие дорожные знаки в основном имеют форму:
А) треугольника
B) прямоугольника
C) круга
D) квадрата
E) ромба
165
Обобщенная структурная схема дорожного контроллера выглядит:
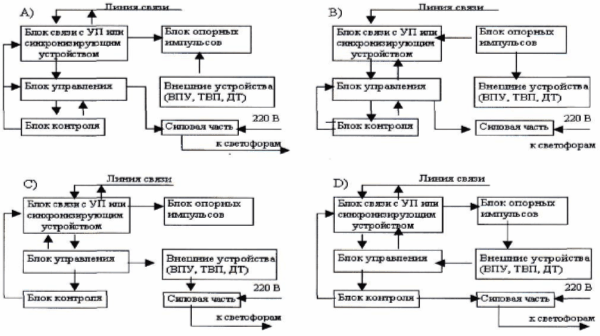

166
В обобщенной структурной схеме контроллера за правильностью отработки тактов светофорной сигнализации и за исправностью силовых цепей следит:
А) блок опорных импульсов
В) блок управления
С) блок контроля
D) блок связи с управляющим пунктом или синхронизирующим устройством
Е) силовая часть
167
Сигналы для работы самого контроллера формируется в:
А) блоке опорных импульсов
В) блоке управления
С) блоке контроля
D) блоке связи с управляющим пунктом или синхронизирующим устройством
Е) силовая часть
168
Временная программа управления перекрестком формируется в:
А) силовая часть
В) блоке опорных импульсов
С) блоке контроля
D) блоке связи с управляющим пунктом или синхронизирующим устройством
Е) блоке управления
169
Какой чувствительный элемент детектора транспорта состоит из двух стальных полос, завулканизированных герметически резиной:
А) пьезоэлектрический
В) фотоэлектрический
С) ультразвуковой
D) радарный
E) электромеханический
170
Какой чувствительный элемент детектора транспорта помещается в электростатический экран:
А) пьезоэлектрический
В) электромеханический
С) фотоэлектрический
D) ультразвуковой
Е) радарный
171
В каком чувствительном элементе детектора транспорта используется пьезоэлектрический преобразователь:
А) электромеханическом
В) ультразвуковом
С) фотоэлектрическом
D) пьезоэлектрическом
Е) радарном
172
Для обнаружения заторов расстояние от чувствительного элемента детектора транспорта до стоп-линии определяется по формуле:
А) Lзат = lа MН / t03.6
В) Lзат = lа t0 MН / 3.6
С) Lзат = lа t0 MН / t03600
D) Lзат = lа t0 MН / 3600
Е) Lзат = lа t0 MН / MН 3.6
173
Для организации координированного управления необходимо выполнение следующих условий:
A) кратный цикл регулирования на всех перекрестках; расстояние между перекрестками не
должно превышать 600 м; интенсивность движения в обоих направлениях не мене 800 ед/ч;
B) наличие по одной полосе для движения в каждом направлении; одинаковый цикл
регулирования на всех перекрестках, входящих в систему координации; расстояние между
перекрестками не должно превышать 800 м;
C) наличие по одной полосе для движения в каждом направлении; кратный цикл регулиро вания на всех перекрестках; расстояние между перекрестками не должно превышать 800 м;
D) своевременное прибытие к перекрестку не менее 60% транспортных средств; одинаковый цикл регулирования на всех перекрестках, входящих в систему координации; расстояние между перекрестками не должно превышать 600 м;
E) наличие не менее двух полос для движения в каждом направлении; одинаковый цикл
регулирования на всех перекрестках, входящих в систему координации; расстояние между
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск