Информационное обеспечение системы управления подъёмно-транспортным механизмом
В качестве объекта управления был выбран подъемно-транспортный механизм. В настоящее время трудно представить практически любое современное производство без использования подъемно-транспортных механизмов на различных этапах производства. Использование подъемно-транспортных механизмов обусловлено необходимостью контроля траектории перемещаемого груза. Особенно важным это является при проведении
различных погрузочных, строительных, и других видов работ связанных с перемещением грузов большой массы и объема.
Груз, поднимаемый краном, раскачивается и при перемещении, и при остановке. Большая начальная скорость перемещения крана является источником колебаний груза на крюке. Обычно эти колебания понижаются посредством уменьшения начальной скорости перемещения крана. Величина раскачивания груза варьируется в зависимости от веса груза, его состояния, метода подвешивания груза на крюке, высоты крана, величины ускорения и т.д.
Работа является актуальной т.к. в условиях современного производственного процесса необходимо наиболее быстрое, качественное и безопасное выполнение различных подъемно-транспортных работ, что и призван осуществлять разработанный нечеткий контроллер.
Целью бакалаврской работы является разработка ПО для моделирования нечеткого контроллера, управляющего подъемно-транспортным механизмом.
В работе решаются следующие задачи:
1. разработка IDE ПО, для моделирование нечетких систем,
2. разработка модели нечеткого контроллера,
3. разработка демонстрационной программы.
Методологическую основу исследований составляет теория адаптивного управления, теория нечетких регуляторов, принципы работы подъемно-транспортных механизмов.
Результаты работы являются практически полезными, т.к. могут найти применение при разработке промышленных нечетких регуляторов для подъемно-транспортных механизмов.
В первом разделе данной работы рассматриваются особенности и проблематика управления системой на различных этапах переноса груза, физический смысл процессов протекающих в системе, приводятся краткие характеристики моделей принятия решений, нечеткая формализация параметров.
Во втором разделе задаются нечеткие и лингвистические переменные, осуществляется определение особенностей управления на каждом этапе перемещения груза, составляются правила “ситуация-действие” позволяющие наиболее качественно осуществлять управление.
В третьем разделе рассматривается программное обеспечение, осуществляющее управление работой микроконтроллера, приводится формальная реализация управляющей программы и рабочий алгоритм ее функционирования.
В четвертом разделе описываются принципы работы с ПО.
В пятом разделе приводится экономическое обоснование актуальности разрабатываемого проекта, определяются капитальные и энергетические затраты.
В шестом разделе производится оценка напряженности труда разработчика, анализ его условий труда и мероприятия по устранению вредных факторов, экологичность работы.
1. ОПИСАНИЕ ПОДЪЕМНО-ТРАНСПОРТНОГО МЕХАНИЗМА
1.1. Модель подъемно-транспортного механизма
Проектирование моделей, в полной мере описывающих различные характеристики и состояния подъемно-транспортного механизма, практически является не решаемой задачей, так как на практике представляется невозможным учесть все внутренние и внешние факторы, оказывающие влияние на подъемно-транспортный механизм в процессе работы. Например, невозможно определить величину и направление ветра в тот или иной момент работы механизма, так же в процессе функционирования объекта могут возникать различные непредвиденные ситуации, помехи.
Большую проблему при проектировании систем подобного рода представляет расчет сил необходимых для “отрывания” груза от опорной поверхности. При существующих методах расчета эта задача не имеет решения или его очень сложно получить в виде пригодном для дальнейшего применения. С помощью аппарата нечетких множеств, используя знания экспертов, можно существенно упростить решение данной задачи. Рассмотрим подробнее действия оператора и состояния подъемно-транспортного механизма в процессе работы.
В процессе работы оператор крана осуществляет некоторую последовательность действий, с целью перемещения груза из одной точки в другую. Оператор, воздействуя на органы управления подъемно-транспортного механизма, задает скорость движения, угол поворота стрелы, направление движения, одновременно контролируя поведение объекта, наблюдая, чтобы не возникало различных нежелательных и критических ситуаций.
Изменение скорости подъемно-транспортного механизма в процессе работы представлено на рис. 1.1
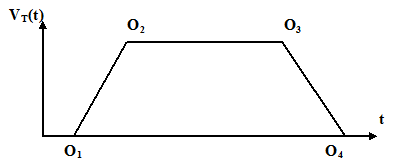
Рис. 1.1. О1 – точка начала разгона, О2 – точка конца разгона, О3 – точка начала торможения, О4 – точка конца торможения
Для каждой из точек характерна некоторая совокупность внутренних и внешних факторов, оказывающих влияние на рассматриваемый объект. На рис. 1.2 показана схема разложения на силы при раскачивании груза, который перемешается краном.
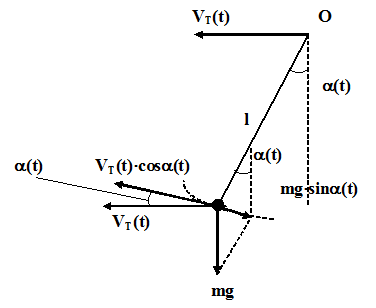
Рис. 1.2 VT(t) - текущая скорость перемещения крана, a(t) - текущий угол отклонения груза, m - масса груза
Баланс моментов относительно точки О имеет вид: М1+М2=М3, где ![]() - момент инерции груза относительно точки подвеса;
- момент инерции груза относительно точки подвеса; ![]() - момент, создаваемый составляющей скорости подвеса относительно точки подвеса; M3=mgl×sina(t) - момент, создаваемый составляющей веса груза относительно точки подвеса.
- момент, создаваемый составляющей скорости подвеса относительно точки подвеса; M3=mgl×sina(t) - момент, создаваемый составляющей веса груза относительно точки подвеса.
После интегрирования и преобразований получим уравнение:
 ,(1.1)
,(1.1)
где a(t=0)=a0, ![]() - начальные условия нелинейного интегро-дифференциального уравнения.
- начальные условия нелинейного интегро-дифференциального уравнения.
Составить дифференциальные уравнения, описывающие подобную динамическую систему достаточно сложно и нет никакой гарантии, что она будет адекватной моделью [2].
1.2. Принцип работы нечетких гибридных регуляторов
Нечеткие регуляторы подразделяют на три типа:
1. Логико-лингвистические регуляторы,
2. Аналитические регуляторы
3. Обучаемые нечеткие регуляторы.
У каждого из этих регуляторов свои достоинства и недостатки, но к наиболее значимым недостаткам ЛЛР табличного типа можно отнести их ограниченную размерность (общее число переменных не должно превышать трех и субъективность выбора интервалов и соответствующих значений лингвистических переменных).
Обучаемые нечеткие регуляторы и системы управления относятся к классу наиболее перспективных. Они сохраняют высокую работоспособность в условиях помех и погрешностей измерения, а также достаточно быстро настраиваются на меняющиеся условия производства, снижая тем самым потери от неэффективного управления.
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды