Разработка оборудования для уплотнения балластной призмы

Рисунок 2.1 – Основные параметры виброподбивки шпал
2.1.1.1 Геометрические параметры
Значения и соотношения геометрических параметров устанавливаются исходя из необходимости формирования зон уплотнения балласта под рельсошпальной решёткой с требуемой степенью уплотнения и подача объёма балласта под шпалы, дос
таточного для закрепления рельсошпальной решётки в выправленном положении.
Эти условия представлены в виде соотношения:
 , (2.1)
, (2.1)
где а – толщина клина, м (а = 0,1 м см. рисунок 2.1); l – длина клина, м; α – угол наклона клина к оси пути, град (принят α = 8˚); K1 – коэффициент, учитывающий попадение под задозированного балласта (принят K1 = 1,25); K2 – коэффициент уменьшения объёма балласта, сдвигаемого виброплитой (принят K2 = 0,95); С – площадь поперечного сечения неуплотнённого балласта под концами шпал (рисунок 2.2) С = 0,3·0,3 = 0,09 м2 .
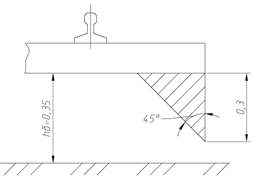
Рисунок 2.2 – Схема к расчету площади поперечногосечения неуплотненного балласта
Из соотношения (2.1) находится l :
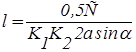 ; (2.2)
; (2.2)
![]() .
.
Длина клина l = 1, 35 м найдено из условия обеспечения подачи балласта требуемого объёма под концы шпал.
Далее находим длину клина l’ исходя из условия обеспечения требуемой степени уплотнения балласта под шпалами.
Для этого определим минимально необходимое число вибровоздействий на балласт, при котором возможно получение требуемой степени уплотнения
![]() , (2.3)
, (2.3)
где ε – требуемая степень уплотнения (принят ε = 0, 145 [1]); D, E – эмпирические коэффициенты, зависящие от рода балласта и способа вибровоздействия. Для щебёночного балласта D = 3300, E = 10 [1]; λ – коэффициент, определяющий степень использования воздействия плиты (λ = 2); ψ – коэффициент, определяющий долю объёма материала охватываемого относительными перемещениями (ψ = 1 [1])
![]() .
.
Находится время воздействия tв,с :
![]() , (2.4)
, (2.4)
где ω – угловая частота колебаний виброплиты, с-1:
![]() , (2.5)
, (2.5)
где f – частота колебаний (принимается f = 30 Гц);
![]() .
.
Тогда
![]() .
.
Находится l’ по формуле:
![]() , (2.6)
, (2.6)
где VM – рабочая скорость машины VM = 0,277 м/с ;
![]() .
.
Из двух значений l и l’ назначаем минимально необходимую длину клина, при которой обеспечивается требуемое число вибровоздействий и достаточная величина подачи балласта под шпалы.
Принимается lкл = 1,35 м.
2.1.1.2 Режим виброобжатия балласта
К параметрам, характеризующим режим виброобжатия балласта, относятся: амплитуда Sa и частота колебаний f , скорость обжатия балласта Vобж .
Для обеспечения наивысшего эффекта уплотнения значение Sa , f, Vобж должны находиться между собой в определённом соотношении [1].
Рекомендуемые значения амплитуды Sa , частоты колебаний f скорость обжатия Vобж находятся в пределах: Sa = 6 … 8 мм, f = 25 . 40 Гц, Vобж = 70 …120 мм/с .
Предварительно принимается: Sa = 6 мм, f = 30 Гц.
Vобж = Vм·tg α,
Vобж = 0,277·tg 8˚ = 0,039 м/с = 39 мм/с .
Должно выполняться условие:
![]() ; (2.7)
; (2.7)
![]() - условие выполняется.
- условие выполняется.
Окончательно принимается: Sa = 6 мм, f = 30Гц, Vобж=39мм/с.
2.1.2 Корпус плиты
Основная цель компоновки корпуса плиты – это определение его возможных размеров, с учётом которых разрабатывается возбудитель колебаний.
Определению подлежат: высота корпуса HК, длина LК и ширина BК (рисунок 2.1).
Высота корпуса HК переменна по его длине и определяется габаритными размерами вибровозбудителя, необходимостью расположения шарнирных соединений рессорных комплектов с плитой.
В первом приближении принимается:
![]() ,
,
![]() ,(2.8)
,(2.8)
где LК – длина корпуса, м (конструктивно принято Lk=1,6 м); γ – угол наклона нижней стенки плиты к горизонтальной плоскости, град (γ=2˚).
![]() .
.
Ширина корпуса BК определяется исходя из необходимости обеспечения безопасности производства работ при подбивке шпал со стороны междупутья.
Максимально возможная ширина корпуса ровна:
![]() , (2.9)
, (2.9)
где BМ – максимально допустимый вылет исполнительных органов в сторону междупутья, м (BМ=2,050 м); Lшп – длина шпалы, м (Lшп=2,75); вК – вылет клина относительно корпуса плиты, м (вk = - 0,085 м); δ – заход клина под торцы шпал, м (δ= - 0,17 м).
![]() .
.
Конструктивно принято Bк = 0,35 м.
В процессе разработки возбудителя колебаний размеры корректируются.
При транспортировке машины плита не должна выходить за приделы габаритов подвижного состава.
Эскизная компоновка корпуса виброплиты показана на рисунке 2.3.
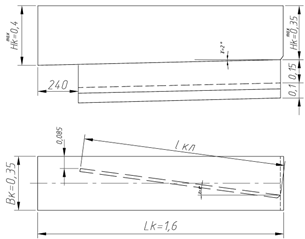
Рисунок 2.3 - Эскизная компоновка корпуса виброплиты
2.1.3 Разработка возбудителя колебаний
Для дебалансного возбудителя рассчитывается требуемая вынуждающая сила FВ и, соответственно, конструкция дебалансов, обеспечивающих колебания виброплиты, с заданной амплитудой.
При вращении дебалансов с угловой частотой ω и амплитудой Sa суммарная вынуждающая сила составит:
![]() , (2.10)
, (2.10)
где mn – приведенная масса колеблющихся элементов, кг; ωo – частота свободных колебаний плиты с учётом жёсткости балласта, с-1; h – коэффициент демпфирования, с-1.
Находим mn:
mn = an ·m, (2.11)
где m –масса корпуса плиты с вибровозбудтелем, кг (m = 400 кг); aп – коэффициент приведения (aп=1,15 [1]).
mn = 1,15·400=460 кг.
Находим ωo:
 ,(2.12)
,(2.12)
где Cр – приведенный коэффициент жёсткости рессорной подвески (принят Cр = 1·106 Н/м); Cб – приведенный коэффициент жёсткости балласта, Н/м.
Другие рефераты на тему «Транспорт»:
- Магнитоэлектрический бесконтактный генератор с импульсным регулятором напряжения
- Сущность и задачи транспортной логистики
- Разработка технологического процесса текущего ремонта жидкостного насоса автомобиля ВАЗ-2109
- Организация эксплуатационной работы на железнодорожных участках
- Классификация смазочных моторных масел
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск