Разработка оборудования для уплотнения балластной призмы
19) Отклонение рабочего контактного напряжения от допускаемого ∆σн, %:
![]() .(2.54)
.(2.54)
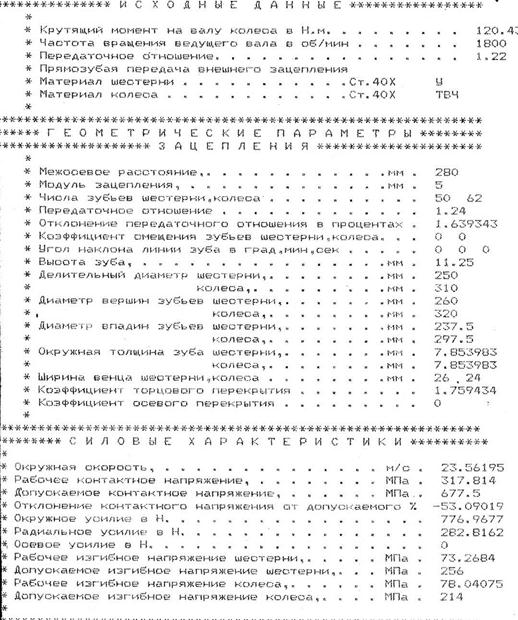
20) Окружное усилие Ft, H:
![]() ,(2.55)
,(2.55)
где ![]() - начальный диаметр колеса, мм.
- начальный диаметр колеса, мм.
=31 src="images/referats/22098/image076.png">,(2.56)
где ![]() - начальный диаметр шестерни, мм.
- начальный диаметр шестерни, мм.
![]() .(2.57)
.(2.57)
21) Радиальное усилие Fy, H:
![]() . (2.58)
. (2.58)
22) Осевое усилие Fa, H:
![]() .(2.59)
.(2.59)
23) Коэффициент перекрытия зубьев Yε :
Yε=1.
24) Коэффициент наклона зубьев Yβ :
Yβ=1.
25) Рабочее изгибное напряжение зубьев шестерни σF2, мПа:
![]() .(2.60)
.(2.60)
26) Рабочее изгибное напряжение колеса σF1, мПа:
![]() .(2.61)
.(2.61)
27) Максимальное контактное напряжение σн max, мПа:
 .(2.62)
.(2.62)
28) Максимальное изгибное напряжение σF max, мПа:
![]() .(2.63)
.(2.63)
Значения рассчитываемых величин представлены на распечатках результатов расчёта, сделанного на ЭBM (программа ДМ-1).
2.3.3 Результаты расчёта зубчатой передачи, выданные ЭВМ
2.3.4 Анализ результатов расчёта зубчатой передачи
Геометрические параметры округляем до сотых долей миллиметра.
По допускаемым и рабочим напряжениям делаем вывод, что прочность достаточна.
Усилие в зацеплении округляем с точностью до целых.
2.4 Уточнённый расчёт валов и выбор подшипников
Данный расчёт даёт более достоверные результаты, чем ориентировочный расчёт.
В этом разделе исходными данными являются: силы, действующие на колесо шестерни, расстояния между линиями действия всех сил, диаметры колёс.
Для наглядного представления изобразим аксонометрическую схему нагружения валов (рисунок 2.9).
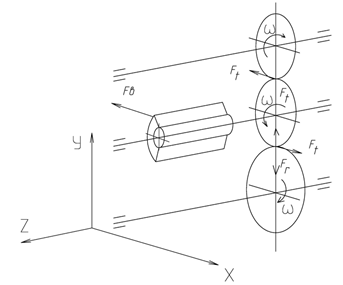
Рисунок 2.9 – Схема нагружения валов
2.4.1 Расчёт дебалансного вала
Для уточнённого расчёта выполним эскизную компоновку элементов вала (рисунок 2.10).
Предварительно назначаем подшипник по ГОСТ 5720 – 75: № 1608 с d=40 мм, D =90 мм, B =33 мм [2].

Рисунок 2.10 – Эскизная компановка элементов вала
На вал действуют две силы в направлении X (рисунок 2.10, б) F’в , Ft и крутящий момент T.
Составим уравнения суммы моментов относительно точек 1 и 2, найдём реакции в этих точках.
ΣM1=0![]() ;
;
![]() .
.
ΣM2=0![]() ;
;
![]() .
.
Находим изгибающий момент в т. 1, 2, 3 ,4 (Рисунок 2.10, в):
![]() ;
;
![]() ;
;
![]()
Максимальный изгибающий момент в т.4 под дебалансом.
Приведённый момент:
![]() ,(2.64)
,(2.64)
где α – коэффициент учитывающий соответствие центров касательного и нормального напряжения (α = 0,75 [4]); T – крутящий момент, Н·м.
T =Ft·d/2 ,(2.65)
где d – делительный диаметр шестерни (d = 0,25 м);
T =777·0,25/2=91,125 Н·м.
![]() .
.
Диаметр вала по формуле:
 ,(2.66)
,(2.66)
![]() .
.
Окончательно принимается диаметр вала d = 0,04 м.
2.4.1.1 Выбор подшипников
Ранее принятый подшипник (см. п.2.4.1) проверяем на динамическую грузоподъёмность:
Стабл. >Cрасч,(2.67)
где Стабл. – динамическая грузоподъёмность взятая из таблицы [3], (Стабл. = 44,9 кН); Cрасч. – динамическая грузоподъёмность полученная методом расчёта, кН.
Cрасч. = L1/P·P,(2.68)
где p – показатель степени (для шарикоподшипников p = 3 [2]); L – номинальный ресурс подшипников, млн. об.; P – эквивалентная нагрузка, Н.
L = Ln·60·nII /106,(2.69)
где Ln – номинальный ресурс в часах (примем Ln=125 ч)
L = 150·60·1800/106=16,2 млн.об.
Эквивалентная нагрузка, Н:
P = R·V·Kδ·KТ , (2.70)
где R – радиальная нагрузка, Н (R = 12959 Н); V – коэффициент вращения (V=1,[2] стр. 359) Kδ – коэффициент, учитывающий нагрузки (Kδ =1,35,[2] стр. 362 ); KТ – температурный коэффициент (KТ =1 [2]).
P = 12959·1·1,35·1=17494,65 H.
Срасч.=16,21/3·17494,65=44266,67 H.
Условие (2.67) выполняется. Окончательно принимаем для дебалансного вала шарикоподшипник радиальный сферический двухрядный (по ГОСТ 5720 – 75) [2]:
№ 1608 С=44,9 мм; d=40 мм; D=90 мм; B=33 мм.
2.4.2 Расчёт ведущего вала вибровозбудителя
Выполним эскизную компоновку элементов вала (рисунок 2.11, а).
На вал действуют две силы в двух плоскостях: Fr в плоскости y0z и Ft в плоскости x0z и действует крутящий момент T (рисунок 2.11, а, г).

Рисунок 2.11 – Эпюра моментов
Находятся реакции в опорах в плоскости z0y (рисунок 2.11, а):
![]()
![]() ;
;
![]() .
.
![]()
![]() ;
;
![]() .
.
Находится изгибающий момент в точках 1, 2, 3 (рисунок 2.11, в):
![]() .
.
![]() .
.
Находятся реакции в опорах в плоскости z0x (рисунок 2.11, г):
![]()
![]() ;
;
![]() .
.
![]()
![]() ;
;
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск