Математическая модель в пространстве состояний линейного стационарного объекта управления
Закон оптимального управления в данной задаче имеет вид
![]()
Матричное дифференциальное уравнение Риккати будет иметь следующий вид:
![]()
Если обозначить ![]() то можно записать
то можно записать
height=31 src="images/referats/14091/image317.png">
Уравнение замкнутой скорректированной системы примет вид
![]()
Матрицы ![]() заданы в пункте 5.1.1.
заданы в пункте 5.1.1.
Весовые матрицы ![]() и
и ![]() имеют следующий вид:
имеют следующий вид:
 ,
, ![]() .
.
Используя скрипт AKOR_stabilizaciya_na_konech_interval.m получили следующие результаты:

Рис.26. Графики решения уравнения Риккати.
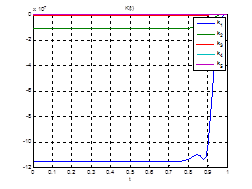
Рис.27. Графики коэффициентов регулятора обратной связи.


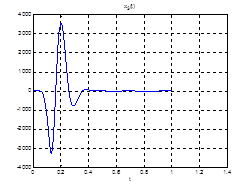
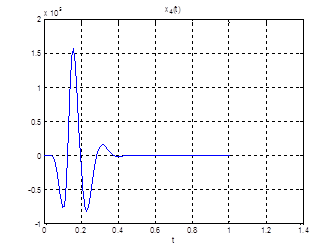

Рис.28. Графики фазовых координат.
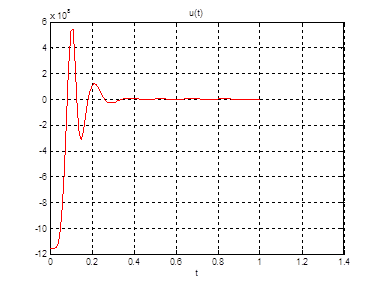
Рис.29. График управления.
Сравним, как стабилизируется система управления с постоянными и переменными коэффициентами регулятора обратной связи на начальном этапе:




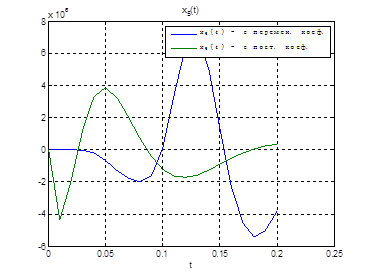
Рис.30. Графики фазовых координат.
Выводы: из графиков видно, что система, у которой коэффициенты регулятора меняются со временем, стабилизируется не хуже, чем, система, у которой коэффициенты регулятора не изменяются.
5.3 Задача АКОР – стабилизации для компенсации известного возмущающего воздействия
Рассмотрим систему вида
![]() ,
,
где ![]() – возмущающее воздействие.
– возмущающее воздействие.
Матрицы ![]() заданы в пункте 5.1.1.
заданы в пункте 5.1.1.
Весовые матрицы ![]() и
и ![]() имеют следующий вид:
имеют следующий вид:
 ,
, ![]() .
.
Начальные условия для заданной системы ![]() .
.
Время стабилизации ![]() .
.
Задаем возмущающее воздействие только на первую координату, так как только она имеет значение
 и
и  .
.
Решение задачи стабилизации сводится к решению уравнения Риккати
![]()
с начальными условиями: ![]()
Введём вспомогательную вектор-функцию ![]() , ДУ которой имеет вид:
, ДУ которой имеет вид:
![]()
с начальными условиями: ![]() .
.
Управление определяется по формуле:
![]() .
.
Используя скрипт AKOR_stabilizaciya_pri_vozmusheniyah.m, получили следующие результаты:
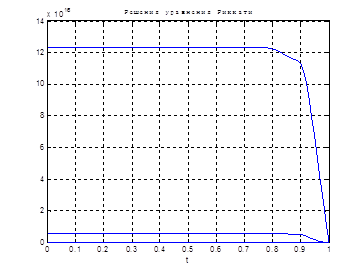
Рис.31. Графики решения уравнения Риккати.

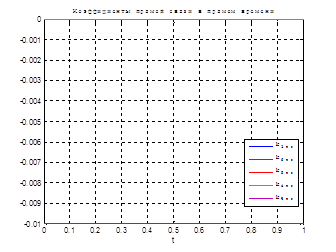
Рис.32. Графики коэффициентов регулятора обратной и прямой связи.

Рис.33. График возмущающего воздействия.

Рис.34. График вспомогательной вектор – функции.
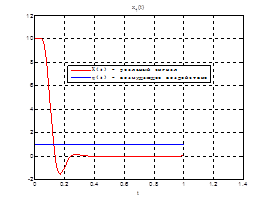


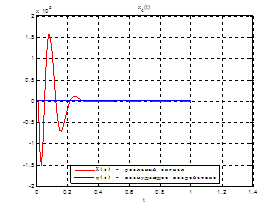

Рис.35. Графики фазовых координат.
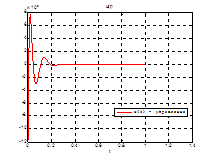
Рис.36. График управления.

Рис.37. График возмущающего воздействия.

Рис.38. График вспомогательной вектор – функции.



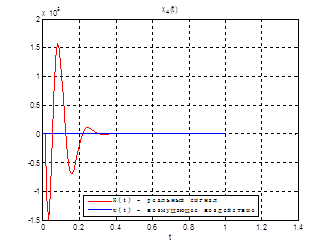

Рис.39. Графики фазовых координат.

Рис.40. График управления.
Выводы: По графикам фазовых координат при различных воздействиях видно, что влияние возмущающего воздействия не существенно и фазовые координаты устанавливаются в ноль. При этом видно, что графики первой фазовой координаты при различных воздействиях мало отличаются друг от друга, т.е. система отрабатывает любое возмущение.
5.4 Задача АКОР для отслеживания известного задающего воздействия. I подход
Система задана в виде:
Матрицы ![]() заданы в пункте 5.1.1.
заданы в пункте 5.1.1.
Весовые матрицы ![]() и
и ![]() имеют следующий вид:
имеют следующий вид:
Другие рефераты на тему «Экономико-математическое моделирование»:
Поиск рефератов
Последние рефераты раздела
- Выборочные исследования в эконометрике
- Временные характеристики и функция времени. Графическое представление частотных характеристик
- Автоматизированный априорный анализ статистической совокупности в среде MS Excel
- Биматричные игры. Поиск равновесных ситуаций
- Анализ рядов распределения
- Анализ состояния финансовых рынков на основе методов нелинейной динамики
- Безработица - основные определения и измерение. Потоки, запасы, утечки, инъекции в модели