Математическая модель в пространстве состояний линейного стационарного объекта управления
![]()
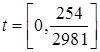
Найдем матрицу управляемости:
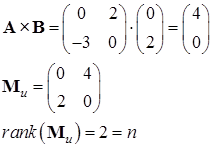
Ранг матрицы управляемости равен порядку системы, следовательно, данная система является управляемой.
![]() следовательно
следовательно ![]() .
.
Собственные числа матрицы ![]() найдем из уравнения
найдем из уравнения ![]() :
:



Действительные части собственных значений матрицы ![]() являются неположительными, следовательно, все условия управляемости выполнены.
являются неположительными, следовательно, все условия управляемости выполнены.
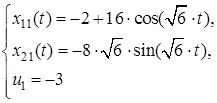
2. Ссылаясь на решение задачи быстродействия из ДЗ№2 по СУЛА «Решение задачи быстродействия» имеем:
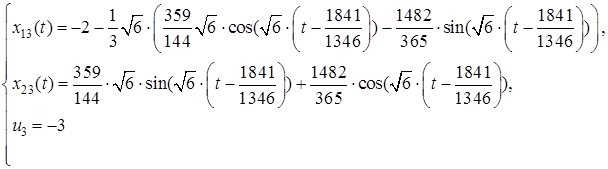
Запишем зависимости ![]() ,
, ![]() , полученные при решении систем дифференциальных уравнений:
, полученные при решении систем дифференциальных уравнений:
 :
:
 :
:

 :
:
 :
:

Перейдем к дискретной модели заданной системы. Имеем
![]() (4)
(4)
где ![]() шаг дискретизации и соответствующие матрицы
шаг дискретизации и соответствующие матрицы
 (5)
(5)
Пусть управление ограничено интервальным ограничением
![]() (6)
(6)
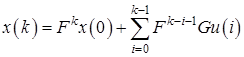
Тогда на ![]() шаге имеем
шаге имеем
 (7)
(7)
Известны начальная и конечная точки
где ![]() – оптимальное число шагов в задаче быстродействия.
– оптимальное число шагов в задаче быстродействия.
Решается задача быстродействия
![]()
а) Формирование задачи быстродействия как задачи линейного программирования
Конечная точка ![]() в дискретной модели представлена в виде
в дискретной модели представлена в виде
 (8)
(8)
Получаем ![]() – равенств
– равенств
 (9)
(9)
Для приведения ограничений (9) к канонической форме сделаем необходимое преобразование в правой и левой частях, чтобы правые части были неотрицательными (если правая часть меньше нуля, то домножаем на (-1) левую и правую части). Отметим проведенные изменения точкой в правом верхнем углу соответствующих векторов
 . (10)
. (10)
Для того чтобы получить необходимый допустимый базис для задачи линейного программирования, добавим формально остаточные искусственные переменные (![]() ). Таким образом, уравнения (10) представляются в виде
). Таким образом, уравнения (10) представляются в виде
 (11)
(11)
Так как текущее управление ![]() – управление имеет любой знак,
– управление имеет любой знак, ![]() то сделаем необходимую замену
то сделаем необходимую замену
![]()
Тогда уравнения (11) примут вид
 (12)
(12)
Введем остаточные переменные в ограничения на управление
![]()
![]()
 (13)
(13)
При объединении выражений (12) и (13) получаем ![]() ограничений.
ограничений.
Начальный допустимый базис состоит из остаточных и остаточных искусственных переменных
![]()
Формируем целевую функцию (по второму методу выбора начального допустимого базиса)
 (14)
(14)
б) Решение задачи быстродействия
Предположим, что ![]() , где
, где ![]() – оптимальное число шагов. Так как значение
– оптимальное число шагов. Так как значение ![]() нам неизвестно (но
нам неизвестно (но ![]() известно точно), выбираем некоторое начальное
известно точно), выбираем некоторое начальное ![]() и решаем задачу линейного программирования (12)-(14).
и решаем задачу линейного программирования (12)-(14).
При этом
Общее число столбцов в симплекс-таблице: ![]()
Число базисных переменных: ![]()
Сформируем ![]() строку. Имеем
строку. Имеем

Выразим из уравнения (12) начальные базисные переменные ![]()

и подставим в целевую функцию. Получим ![]() – строку
– строку
 (15)
(15)
Решаем задачу (12) – (14) симплекс-методом.
В случае,
если ![]() ,
, ![]() – малое число
– малое число ![]()
иначе
1) если ![]() увеличить
увеличить ![]() и целое,рвернуться к первому шагу формирования задачи линейного программирования;
и целое,рвернуться к первому шагу формирования задачи линейного программирования;
Другие рефераты на тему «Экономико-математическое моделирование»:
Поиск рефератов
Последние рефераты раздела
- Выборочные исследования в эконометрике
- Временные характеристики и функция времени. Графическое представление частотных характеристик
- Автоматизированный априорный анализ статистической совокупности в среде MS Excel
- Биматричные игры. Поиск равновесных ситуаций
- Анализ рядов распределения
- Анализ состояния финансовых рынков на основе методов нелинейной динамики
- Безработица - основные определения и измерение. Потоки, запасы, утечки, инъекции в модели