Автоматизация шлифовального процесса путем разработки автоматической системы управления регулируемым натягом
Рис.3.2 Схема регулирования координат АД изменением напряжения на статоре (а) и механические характеристики(б)
Регулирование напряжения на статоре не приводит к изменению скорости холостого хода w0=2pf1 /p и не влияет на критическое скольжение sk, но существенно изменяет величину критического (максимального) момента Mk. Как следует из схемы, снижение напряжения приводит к резкому уменьшению
Мк, пропорционально квадрату напряжения.
В результате при U 1рег =var искусственные характеристики (рис.3.2,б) оказываются малопригодными для целей регулирования скорости, так как по мере уменьшения напряжения резко снижаются критический момент АД и тем самым его перегрузочная способность, а диапазон регулирования скорости очень мал. Характеристики 3—6 построены при напряжениях 1;0,8; 0,6 и 0,4 от U 1ном.
Для регулирования напряжения на статоре АД могут использоваться различные электротехнические устройства—автотрансформаторы, магнитные усилители и тиристорные регуляторы напряжения (ТРН). Последние получили в настоящее время наибольшее распространение из-за высокого КПД, простоты в обслуживании, легкости автоматизации работы ЭП. Рассмотрим принцип действия ТРН и основанную на его использовании систему ЭП “тиристорный регулятор напряжения — асинхронный двигатель” (ТРН — АД).


Рис. 3.3. Схема (а) я кривые напряжения (б) однофазного ТРН
На рис. 3.3, а показана схема регулирования напряжения на однофазной нагрузке переменного тока Zy. Силовая часть однофазного ТРН образована двумя тиристорами VS1 и VS2, включенными по встречно-параллельной схеме, которая обеспечивает протекание тока в нагрузке в оба полу периода напряжения сети U1. Тиристоры получают импульсы управления Ua, от СИФУ, которая обеспечивает их сдвиг на угол управления a в функции внешнего сигнала управления Uy.
Осуществляя подачу импульсов управления на тиристоры с некоторой задержкой относительно предельного режима (угол управления a¹О), то к нагрузке будет прикладываться часть напряжения сети (рис. 3.3,6). Изменяя угол управления а от нуля до p, можно регулировать напряжение на нагрузке от полного напряжения сети до нуля. На основе однофазной схемы создаются трехфазное схемы для регулирования напряжения на статоре АД. Такая схема, состоящая из шести тиристоров VS1 — VS6, доказана на рис. 3.4
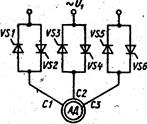
Рис.3.4 Схема трехфазного тиристорного регулятора-напряжения
Форма напряжения на нагрузке является несинусоидальной. Несинусоидальное напряжение можно представить как совокупность нескольких синусоидальных напряжений—гармоник, каждая из которых изменяется с определенной частотой. Частота изменения первой из них (основной гармоники) равна частоте питающего напряжения, а частота других гармоник больше, чем первой. Обычно 1-я гармоника имеет наибольшую амплитуду, и по ней ведутся все основные расчеты.
3.5.2 Регулирование скорости асинхронного двигателя изменением частоты
Данный способ, называемый частотным, является одним из наиболее перспективных, и широко внедряется в настоящее время. Принцип его заключается в том, что, изменяя частоту fi питающего АД напряжения, можно в соответствии с выражением w0 == 2pf1/p изменять его скорость w0 получая различные искусственные характеристики. Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а получаемые характеристики обладают высокой жесткостью. Для лучшего использования АД и получения высоких энергетических показателей его работы — коэффициентов мощности, полезного действия, перегрузочной способности- одновременно с частотой необходимо изменять и подводимое к АД напряжение. Закон изменения напряжения при этом зависит от характера момента нагрузки Мc.
При постоянном моменте нагрузки Mc =const напряжение на статоре должно регулироваться пропорционально его частоте: U/f=const.
Для вентиляторного характера момента нагрузки это соотношение имеет вид: U/f2=const.
Таким образов, при реализации частотного способа регулирования скорости АД должен быть использован преобразователь частоты, который позволяет также регулировать и напряжение на статоре АД.
3.6 Схема включения АД и его характеристики
Необходимым элементом ЭП является преобразователь частоты 1и напряжения, на вход которого подается стандартное напряжение сети U (380 В.) промышленной частоты f = 50 Гц, а с его выхода снимается переменное напряжение U1per регулируемой частоты f1рег (рис.3.5, а)

Рис.3. 5. Схема асинхронного ЭП (а) и механические характеристики АД (6) при частотном регулировании
Регулирование выходной частоты и напряжения осуществляется с помощью управляющего сигнала Uy, изменение которого определяет в конечном итоге изменение скорости двигателя 2.
Анализ механических характеристик АД U/f =const показывает, что скорость wо идеального холостого хода АД изменяется при регулировании f1, а критический момент Mк, остается неизменным.
Так как w0~f1 и xк~f1 то и момент М~U/f
Область частот f1<fном. - область регулирования для асинхронного двигателя (характеристики 3—5) соотношение U/f =const может выполняться, так как напряжение, подводимое к АД, регулируется от номинального (сетевого) в сторону уменьшения. Поэтому М=const и АД имеет постоянную перегрузочную способность.
Рассмотрим теперь принципы действия и виды применяемых в этой системе ЭП преобразователей частоты.
3.7 Преобразователи частоты
3.7.1 Принцип действия ПЧ
Различные типы ПЧ, которые нашли применение в области частотного управляемого, асинхронного ЭП, могут быть разделены на две группы, отличающиеся друг от друга по используемым техническим средствам и по структуре.
Первую группу составляют так называемые электромашинные вращающиеся ПЧ, в которых, для получения переменной частоты, используются обычные или специальные электрические машины.

Рис.3.6. Схема электромашинного ПЧ с синхронным генератором
На рис.3.6. приведена схема ПЧ с синхронным генератором 3, от которого питаются три асинхронных двигателя 5—7. Преобразователь состоит из двух частей: агрегата постоянной скорости, включающего асинхронный двигатель 1 и приводимый им генератор постоянного тока 2, и агрегата переменной скорости, состоящего из регулируемого двигателя постоянного тока 3, приводящего во вращение синхронный генератор переменной частоты. Двигатель 1 питается от сети со стандартной частотой f1 = 50 Гц, а на выводах синхронного генератора 4 частота и напряжение могут регулироваться. С помощью резистора R1 в цепи обмотки возбуждения генератора 2 изменяется напряжение, подводимое к якорю двигателя 3, и тем самым его скорость и скорость генератора 4. При этом меняется частота напряжения на выводах синхронного генератора 4, определяемая выражением fрег=pwсг/(2p), и на двигателях 5—7. Напряжение на этих двигателях регулируется с помощью резистора R3, включенного в цепь обмотки возбуждения синхронного генератора 4.
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды