Автоматизация шлифовального процесса путем разработки автоматической системы управления регулируемым натягом
Питание автономных инверторов тока (АИТ) осуществляется от источника тока, например управляемого выпрямителя, к выходу которого подключается реактор большой индуктивности. При использовании АИТ управляющими воздействиями на АД являются частота и ток статора.
Каждый из видов автономного инвертора имеет в частотно управляемом асинхронном ЭП свою область применения. Для АИН характерны практиче
ская независимость выходного напряжения от режима работы АД, что обусловливает его предпочтительное использование в разомкнутых асинхронных ЭП, а также при управлении группой регулируемых АД. Недостатками ПЧ с АИН являются использование конденсаторов на их входе большой мощности, массы и габаритов; большое количество тиристоров и Коммутирующих элементов; введение в схему ПЧ для обеспечения рекуперации энергии в сеть дополнительного ведомого сетью инвертора.
ПЧ с АИТ по отношению к двигателю является источником переменного тока регулируемой частоты, что позволяет создать достаточно простые и быстродействующие асинхронные ЭП и определяет его предпочтительное применение для индивидуальных реверсивных ЭП, работающих в интенсивном повторно кратковременном режиме. К достоинствам ПЧ с АИТ относятся также отсутствие конденсатора на входе АИТ; возможность рекуперации активной энергии в сеть без усложнения схемы; относительно небольшое количество тиристоров и силовых диодов. Недостатком АИТ является необходимость включения входного реактора.
Регулирование выходного напряжения ПЧ может осуществляться несколькими способами. В ПЧ с непосредственной связью регулирование выходного напряжения осуществляется так же, как и в управляемых выпрямителях. Такое управление получило название фазового.
В ПЧ со звеном постоянного тока регулирование напряжения на нагрузке (статоре АД) производится или от специального регулятора напряжения, или самим инвертором.
Первый способ, в свою очередь, может быть реализован двумя путями—за счет использования управляемого выпрямителя (фазовое управление) или неуправляемого выпрямителя и размещаемого между ним и инвертором широтно-импульсного преобразователя (ШИП) (амплитудное регулирование напряжения). К достоинствам этого способа следует отнести широкий диапазон регулирования напряжения и возможность использования для любого типа инвертора.
Второй способ связан с совмещением функций регулирования частоты и напряжения в самом инверторе. Оно реализуется с помощью; сложных алгоритмов управления тиристорами и предусматривает использование широтно-импульсной модуляции (ШИМ).
3.9 Схема управления параметрами системы

Рис.3. 11.: Схема ПЧ со звеном. постоянного тока и АИН
На рис.3.11 показана схема силовой части ЭП с асинхронным двигателем 3, в котором использован ПЧ со звеном постоянного тока и автономный инвертор 2 напряжения. В этой схеме на выходе управляемого выпрямителя 1 включены реактор фильтра l0 и конденсатор Со, обеспечивающий вместе с диодами VD7— VD12 циркуляцию реактивной мощности. Автономный инвертор 2 напряжения выполнен на тиристорах VS1 — VS6. Конденсаторы С и реакторы L вместе с диодами VD1—VD6 образуют цепи искусственной коммутации, обеспечивающие выключение тиристоров VS1— VS6 в нужный момент. Амплитуда напряжения на выходе инвертора регулируется изменением напряжения Е0 на его входе с помощью блока управления выпрямителем 1, а его частота fper определяется частотой коммутации тиристоров VS1—VS6, задаваемой блоком управления инвертором.
Частотное управление является экономичным, так как обеспечивает регулирование скорости АД без больших потерь мощности в роторной цепи, ухудшающих КПД ЭП и приводящих к необходимости завышения мощности АД.
Регулирование в этой системе может осуществляться плавно, в широком диапазоне, в обе стороны от естественной характеристики, т.е. АД может иметь скорость как больше, так и меньше номинальной.
Трехфазная нагрузка Zа, Zв, Zс (обмотки статора АД) соединена на коротко, а тиристоры VS1—VS6 (рис.3.12), на которых выполнен инвертор, соединены по мостовой схеме и по сигналам от блока управления системы ЧПУ открываются в требуемой последовательности.
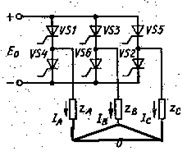
Рис.3.12 инвертор управления коротко замкнутого статора.
Продолжительность открытого состояния каждого тиристора l, составляет половину или треть периода Тper=l/fper а сдвиг моментов открытия тиристоров VS1 — VS6 составляет шестую часть этого периода.
Анализируя работу схемы рис. 3.11 оказывается, что при l=Трег/2, форма напряжения на фазах нагрузки соответствует кривым на рис. 3.13 с амплитудой напряжения, равной Е0
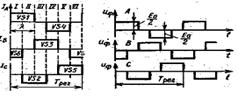
Рис. 3.13. Диаграмма работы тиристоров и график изменения напряжения на нагрузке, при- l=Трег/2
В течении интервала I открыты тиристоры 1 и 6. Напряжение идет с фазы А на фазу В и равно U0 –оно положительно так как идет с плюсового вывода. На интервале II открыты тиристоры 1 и 2, фазы А и С при этом приложенное напряжение меньше в двое и направление токов на обмотке отрицательно.
Таким же образом можно описать схемы соединения фаз обмоток стартера для оставшихся интервалов. Напряжения на фазах нагрузки имеет ступенчатую форму.
Изменения значений фазных токов с помощью регулятора тока позволит менять этот параметр по ширине и скважности сигнала на вход тиристорного инвертора. Сигналы обратной связи по току, приходящие с датчиков, контролирующих этот параметр от двух фаз, приходит на регулятор, где сравнивается с заданными (сформированными) значениями, полученными с управляющей ЧПУ которая и управляет процессом.
Параметры значения величины и амплитуды напряжения на обмотках стартера преобразуется из величины w снятого с тахогенератора-вращающегося трансформатора и также регулируются, в зависимости от заданных УЧПУ значений, управляя величиной мощности на управляемом выпрямителе. При поступлении положительных сигналов на вход широтно- импульсного модулятора Uу=Uз-Uос он начинает генерировать импульсы управления. А эти сигналы распределяются регулятором по тиристорам выпрямителя. Пусть при процессе обработки произошло увеличение момента нагрузки двигателя (увеличилась глубина шлифовки) в результате начнется снижение скорости вращения круга. В соответствии с:
Uвых=Up-g*w,
где
Uвых- напряжение идущее с регулятора.
g- коэффициент обратной связи по скорости регулируемый за счет изменения тока с датчиков
Величина сигнала Uу, величина рассогласования в регуляторе влияющая на работу ШИМ, начнет повышаться, что вызовет увеличение амплитуды напряжения обмоток и уменьшения скважности их токов- увеличение тока стартера и момента АД, что приведет к прекращению снижения скорости.
3.10 Регулятор тока
Он включает в себя аналоговую (датчики тока, фазовращатели) и цифровую (схема выбора режимов, дешифратор кодов и формирователи). Датчики тока (ТТ1 и ТТ2) включены только в обмотках фаз А и В
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды