Автоматизация шлифовального процесса путем разработки автоматической системы управления регулируемым натягом
Фазоврашатель представляет собой фильтр второго порядка, настроенный на частоту. ФВ осуществляет формирование синусоидальной формы сигнала ТА', подавляя высокочастотные пульсации. При этом он вносит фазовый сдвиг сигнала ТА' на 60 эл. градусов в сторону отставания по сравнению с сигналом ТА, поступающим непосредственно с датчика тока. Датчик тока построен по принципу магнитного компаратора и ко
нструктивно выполнен на ферритовом кольце.


Рис.3.14 Зависимость индуктивности обмотки lk датчика тока от намагниченности
Магнитное поле, создаваемое фазным током двигателя компенсируется полем тока, протекающего по компенсационной обмотке wk трансформатора тока ТТ1 и ТТ2. Поскольку число витков обмоток Wн и Wk разное, то обеспечивается масштабирование по отношению к измеряемому току. Компенсационный ток Iк формируется импульсным усилителем ИУ, управляемым компаратором D1. Переключение D1 осуществляется производной от ЭДС самоиндукции на обмотке wk. ЭДС зависит от тока в обмотке wk и от индуктивности обмотки (рис. 3.14).
Знак тока Iк зависит от полярности напряжения Е NА на выходе ИУ.
Длительность полу периодов устанавливается автоматически такой, что постоянная составляющая тока Iк в обмотке wk будет пропорциональна измеряемому току Iа.
На выходе ИУ включены индуктивности L1 и L2, исключающие резкое нарастание тока Iк.
В случае, если по какой-либо причине не произойдет переключение D1, нарастание сигнала ТА вызовет пробои стабилитронов VI и V2, что повлечет переключение D1 и возврат к рабочему циклу намагничивания кольца.
Рис. 3.15. Формирователь импульсов управления инвертором.
Схема формирователя сигналов управления инвертором формирует сигналы КА1 и КА4 (фазы А). КB6 и КB3 (фазы B), КC2 и К25 (фазы C). Схема формирователя представлена на рис. 3.15
Изменение уровня напряжения обеспечивается элементами V46, V47, V40,V41, R77, R78.
3.11 Регулятор скорости
И используется в приводе подачи. Он предназначен для формирования сигналов задания фазных токов фаз А и В, для контроля функционирования контура регулирования скорости и выработки сигналов “перегрев двигателя” и “превышение момента” на валу двигателя.
Функциональная схема блока приведена в приложении.
Усилитель регулятора скорости (ОУ Dl, D2) выполнен по схеме ПИ-регулятора, вырабатывающего сигнал задания момента Uq Уровень сигнала U определяет задание момента на валу двигателя. Ограничение выполняется диодным ограничителем V6 .V9. Повторитель на ОУ D2 служит для согласования ПИ-регулятора с последующими схемами.
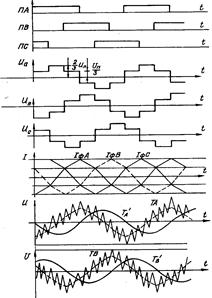
Рис. 3.16. Временные диаграммы работы регулятора тока РТ
При превышении уровня на выходе ПИ-регулятора (Dl) срабатывает компаратор D3, расположенный в схеме ФБЛ. Выдается сигнал блокировки ФБ в блок автоматики АП5.
Сигнал задания тока статора Tзс формируется в виде суммы двух векторов, модули которых пропорциональны сигналам Ud и Uq. Векторное суммирование эквивалентно суммированию двух синусоидальных сигналов, смещенных на 60°, амплитуды которых соответственно пропорциональны Ud и Uq. Фаза полученного сигнала зависит от полярности и отношения (Uq/Ud). Суммирование выполняет ОУ D14.
Сигнал задания тока ротора Гзр, пропорциональный Uq, формируется в формирователе ФТР. Этот сигнал определяет (совместно с частотой скольжения) величину и направление момента на валу двигателя.
3.12 Математическое описание асинхронного двигателя
Асинхронная машина представляет собой систему, как минимум двух обмоток, одна из которых расположена на неподвижной части (статоре), другая на вращающейся части (роторе) машины. Момент машины образуется в результате взаимодействия токов в этих обмотках. Трехфазная обмотка статора подключается к питающей сети, трехфазная обмотка ротора замкнутая. Обмотки статора и ротора магнитосвязаны, поэтому потокосцепление обмотки статора определяется как токами, протекающими по трем фазам обмотки статора, так и токами фаз ротора. Это же относится и к обмотке ротора. Таким образом, имеются две трехфазные обмотки, вращающиеся одна относительно другой. Если к обмотке статора приложено трехфазное напряжение, а обмотка ротора замкнута, то мгновенные значения фазных напряжений статора и ротора задаются следующими уравнениями:
 (3.1)
(3.1)
Исходя из теории результирующего вектора, описанной в системе уравнений 3.1, умножим первое и четвертое уравнения системы (1) на ![]() , второе и пятое на
, второе и пятое на ![]() , третье и шестое на
, третье и шестое на ![]() . Суммируя полученные произведения, получим:
. Суммируя полученные произведения, получим:
![]()
![]() ,
,
или
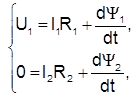 (3.2)
(3.2)
где потокосцепления Y1 и Y2 зависят от токов ротора и статора, а также от индуктивностей обмоток машины.
Определим величины потокосцеплений статора и ротора. Предположим, что статор и ротор трехфазного асинхронного двигателя имеют симметричные обмотки, воздушный зазор по всей окружности ротора одинаков, магнитное поле в воздушном зазоре распределено синусоидально, оси обмоток статора и ротора не совпадают, образуя произвольный угол j (рис. 3.17). Устанавливаем величину полного магнитного потока, сцепленного со статорной обмоткой фазы A. Для этого учитываем магнитные поля, созданные фазными токами I1A, I1B, I1C. Принимаем, что индуктивности фазных обмоток статора одинаковы и равны l1, взаимные индуктивности фаз A-B, A-C и B-C также одинаковы и равны l0 (по условиям симметрии асинхронной машины).
Тогда общий магнитный поток, сцепленный со статорной обмоткой фазы A выразится следующим образом:
![]() .
.
Подставив вместо I1C величину (-I1A-I1B) (так как сумма фазных токов асинхронного двигателя равна нулю), получим:
![]() .
.
Проделав аналогичные операции с фазами B и C, запишем следующую систему уравнений:
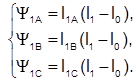 (3.3)
(3.3)
Заметим, что индуктивность фазной обмотки статора включает в себя индуктивности от полей рассеяния и от главного потока, то есть
l1=l1l+l10 (3.4).
Так как, в общем случае, взаимная индуктивность двух обмоток со сдвинутыми на некоторый угол осями равна произведению взаимной индуктивности, которая имела бы место при совпадении осей обмоток, на косинус угла между осями, то взаимную индуктивность можно выразить соотношением:
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды