Автоматизация шлифовального процесса путем разработки автоматической системы управления регулируемым натягом
При математическом описании АД принят ряд допущений, соответствующих идеализированному представлению АД:
· фазные обмотки симметричны, одинаковы, воздушный зазор по все окружности ротора одинаков;
· не учитываются потери в стали, а также высшие гармоники магнитодвижущей силы и рабочего потока;
· параметры АД постоянны и не зависят от токов в обмотках АД;
Цель проекта сводится к
разработке автоматической системы регулирования частоты тока, поступающего на обмотки статора асинхронного электропривода и напряжения питания на базе автономного мостового инвертора тока с трехфазным одно-обмоточным двигателем. При этом автоматическое изменение электрических параметров регулирует механические силы, действующие на привод.
3.3 Анализ существующих средств автоматизации
Известные в настоящее время технические устройства для частотного управления асинхронным электроприводом в полной мере не отвечают требованиям, предъявляемым к мощному высоковольтному электроприводу и им присущи следующие недостатки:
· ограниченная низкоскоростными электроприводами область применения, необходимость изготовления специальной машины или переделка серийной, применение специальных устройств для механического сочленения валов, невозможность применения в запыленных и агрессивных средах, что обусловлено наличием датчиков на валу и внутри машины;
· высокая сложность технической реализации, обусловленная наличием сложных технических устройств: координатного преобразования, векторных фильтров, фазовращателей, функциональных преобразователей, блоков коррекции мгновенного значения частоты;
· наличие большого числа датчиков, осуществляющих высоковольтную гальваническую развязку;
· невысокая надежность, что обусловлено наличием датчиков на валу и внутри машины, высокой сложностью технической реализации блоков АСР, датчиков, осуществляющих высоковольтную гальваническую развязку.
3.4 Обоснование системы автоматического управления
При частотном управлении асинхронными двигателями наиболее часто используются следующие законы: поддержание постоянства потокосцепления статора (Y1=const), поддержание постоянства главного потока машины (Y0=const), поддержание постоянства потокосцепления ротора (Y2=const), и регулирование величины потокосцепления в зависимости от величины нагрузочного момента (Y1, Y0, Y2) =f(M)).
Первый закон реализуется при поддержании постоянного отношения ЭДС статора к угловой частоте поля. Основным недостатком такого закона является пониженная перегрузочная способность двигателя при работе на высоких частотах, что обусловлено увеличением индуктивного сопротивления статора и, следовательно, снижением потокосцепления в воздушном зазоре между статором и ротором при увеличении нагрузки.
Поддержание постоянства главного потока повышает перегрузочную способность двигателя, но усложняет аппаратную реализацию системы управления и требует либо изменений конструкции машины, либо наличия специальных датчиков.
При поддержании постоянного потокосцепления ротора, момент двигателя не имеет максимума, однако при увеличении нагрузки увеличивается главный магнитный поток, приводящий к насыщению магнитных цепей и, следовательно, к невозможности поддержания постоянства потокосцепления ротора.
Общим недостатком законов с поддержанием постоянства потокосцепления являются: низкая надежность, обусловленная наличием датчиков, встраиваемых в двигатель, и потери в стали при работе двигателя с нагрузочным моментом меньше номинального. Эти потери вызваны необходимостью поддержания постоянного номинального потокосцепления в различных режимах работы.
Существенно повысить КПД двигателя можно путем регулирования магнитного потока статора (ротора) в зависимости от величины нагрузочного момента (скольжения). Недостатками такого управления являются низкие динамические характеристики привода, обусловленные большой величиной постоянной времени ротора, из-за чего магнитный поток машины восстанавливается с некоторой задержкой и сложность технической реализации системы управления.
В то же время существует ряд приводов таких механизмов как насосы, компрессоры, конвейеры и т. д., которые занимают промежуточное положение между динамичными и низко динамичными, и для которых существующие системы не в полной мере удовлетворяют предъявляемым к этим приводам требованиям. Высоко динамичные привода имеют сложную систему управления и повышенные энергетические потери при недогрузе двигателей, а низко динамичные привода не всегда способны отработать быстрые изменения статического момента.
Как уже было отмечено, высокими энергетическими характеристиками обладают системы с регулированием магнитного потока в функции нагрузки. Увеличить их динамические характеристики можно путем форсировки статорного напряжения (тока) во время переходных процессов и частых формирований управляющих воздействий. Получить высокую надежность можно за счет применения упрощенной системы регулирования, отказа от встроенных в двигатель и механически связанных с ротором датчиков.
3.5 Схема включения, статические характеристики и режимы работы асинхронного двигателя
Трехфазный АД имеет обмотку статора, подключаемую к трехфазной сети переменного тока с напряжением U и частотой f, и обмотку ротора, которая может быть выполнена по двум вариантам (рис.3.1).

Рис.3.1. Схемы включения АД с фазным ротором (а) и с короткозамкнутым ротором (б)
Первый вариант предусматривает выполнение обычной трехфазной обмотки из проводников с выводами на три контактных кольца. Такая конструкция соответствует АД с фазным ротором и позволяет включать в роторную цепь различные электротехнические элементы, например резисторы для регулирования скорости, тока и. момента ЭП, и создавать с той же целью. Специальные схемы включения АД. Другой вид обмотки получают заливкой алюминия в пазы ротора, в результате чего образуется конструкция, известная под названием “беличья клетка”. Схема АД с такой обмоткой, не имеющей выводов и получившей название короткозамкнутой.
3.5.1 Регулирование параметров электропривода с асинхронным двигателем изменением напряжения
Изменение величины напряжения, подводимого к статору АД, позволяет осуществлять в статических и динамических режимах регулирование его мощности с помощью относительно простых схем управления.
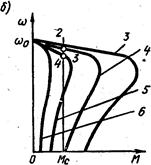
Для регулирования координат короткозамкнутого АД между сетью переменного тока со стандартным напряжением U 1ном и статором (рис.2, а) двигателя 2 включен регулятор I напряжения, выходное напряжение которого U 1рег изменяется с помощью внешнего сигнала управления U. Изменяя величину этого сигнала, можно регулировать напряжение на статоре двигателя U 1рег в пределах от величины сетевого напряжения U 1ном и практически до нуля. При, этом частота напряжения на двигателе не изменяется и равна стандартной (50 Гц).

Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды