Физика разрушения горных пород при бурении нефтяных и газовых скважин
Для нахождения слагаемых Wф и Wv будем использовать следующее очевидное равенство, связывающее главные нормальные напряжения 1, 2, 3 тензора напряжений, среднее нормальное напряжение ср, главные нормальные напряжения тензора-девиатора s1 = (s1 s), s2 = (s2 s s1 = s1 + s, s2 = s2 + s, s3 = s3 + s
и аналогичные выражения для главных линейных деформаций e1, e2, e3:
e1 = e1 + e, e2 = e2 + e, e3 = e3 + e,
где e1 = e1 e, e2 = e2 e, e3 = e3 e представляют собой главные линейные деформации девиатора деформаций.
Подставляя эти выражения в формулу (5) для W, найдем
2W = (s1e1 + s2e2 + s3e3) + 3se + e(s1 + s2 + s3) + s(e1 + e2 + e3).
В полученном выражении члены (s1 + s2 + s3) и (e1 + e2 + e3) тождественно равны нулю. Это означает, что, учитывая (51), можно записать следующие выражения для энергии формоизменения Wф и энергии изменения объёма рассматриваемого кубика Wv:
Wф = (s1e1 + s2e2 + s3e3) / 2;
Wv = 3se/ 2.
Используя следующие выражения закона Гука для изотропного тела:
s1 = 2Ge1, s2 = 2Ge2, s3 = 2Ge3, ср = 3Kср;
из предыдущих выражений получим
W = (s12 + s22 + s32) / (4G);
Wv = s2 / (2K).
Выражению для Wф можно придать и другой вид
W = I2(T)/(2G) = ti2/(2G),
где I2(Tнд) – второй инвариант девиатора напряжений.
Выражение для энергии упругого деформирования окончательно принимает вид
W = s2/(2K) + ti2/(2G).
2.4 Геометрическая интерпретация напряженного состояния
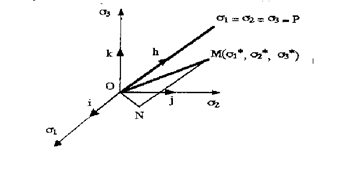
Прежде всего, дадим геометрическую интерпретацию напряженного состояния изотропного тела, отобразив это состояние в трехмерном пространстве главных нормальных напряжений 1, 2, 3 (рис. 4).
Начало координат соответствует отсутствию напряжений в теле. На осях координат лежат точки, отображающие простое растяжение или сжатие вдоль этих осей. На координатных плоскостях 12,23, 13 расположены точки, отображающие плоское напряженное состояние.
Прямая, наклоненная под одинаковыми углами (cos = 3-0,5) ко всем трем координатным осям, называется пространственной диагональю или гидростатической осью. Она определяет положение точек, соответствующих гидростатическому состоянию: s1 = s2 = s3 = P.
Рис. 4. Геометрическая интерпретация напряженного состояния
Единичный векторh, направленный вдоль гидростатической оси, определяется выражением h = где i,j, k – единичные вектора по направлению осей 1, 2, 3 (рис. 4). Плоскость, проходящая через начало координат (т.О) и перпендикулярная вектору h, называется девиаторной плоскостью.
Так как направление нормали к девиаторной плоскости задается проекциями вектора h на оси координат, то из общего уравнения плоскости, проходящей через рассматриваемую точку с координатами (1*, 2*, 3*),
A(s1 s1*) + B(s2 s2*) + C(s3 s3*) = 0,
где A= i,B= j,C= k, следует, что уравнение такой плоскости имеет вид
s1 + s2 + s3 = 0.
Любая точка M трехмерного пространства 1, 2, 3, имеющая координаты 1*, 2*, 3*, изображает некоторое напряженное состояние, характеризуемое главными напряжениями 1, 2, 3 (Рис. 4).
Дадим геометрическую интерпретацию величинам ср и i. В качестве образа напряженного состояния мы будем рассматривать не точку М, а вектор ОМ, соединяющий начало координат О с точкой М(1, 2, 3):
= s1*i + s2* j + s3* k.
Если мы разложим вектор OM, характеризующий напряженное состояние, на составляющие MN и ON, параллельную и перпендикулярную гидростатической оси, соответственно, то составляющая MN определится выражением MN = (OMh)h, где
OMh = (s1*i + s2*j + s3*k) s× Следовательно
MN = s× т.е. проекция вектора напряжений OM на гидростатическую ось пропорциональна величине среднего напряжения ср.
Учитывая выражения для векторов MN и OM, можно записать
ON = OM MN = (s1*i + s2*j + s3*k) s(i + j + k) =
= (s1 s)i + (s2 s)j + (s3 s) k.
В последнем выражении величины, находящиеся в круглых скобках, представляют собой главные нормальные девиаторные напряжения
s1 = (s1 s), s2 = (s2 s), s3 = (s3 s).
Так как векторONпо определению перпендикулярен гидростатической оси, то он должен лежать в девиаторной плоскости. Иначе говоря, проекции вектора напряженийOM (1*, 2*, 3*) на девиаторную плоскость равна «вектору девиаторных напряжений» s1 , s2 , s3. Иначе это можно выразить и так: точкаN– проекция точки M на девиаторную плоскость – изображает девиаторные напряжения, отвечающие точ-кеM. Любой вектор, принадлежащий девиаторной плоскости, характеризует девиатор напряжений какого-либо напряженного состояния M(1*, 2*, 3*).
Радиальное расстояние между любой точкой, находящейся на гидростатической оси, и точкойM, расположенной на плоскости, параллельной девиаторной плоскости (в частности, расстояние между точкой O (начало координат) и точкой N, расположенной на девиаторной плоскости, проходящей через начало координат), найдем по известной (раздел курса математики «Аналитическая геометрия в пространстве») формуле
![]()
![]()
![]() (i + j + k),
(i + j + k),
![]() (i + j + k) = (s1* + s2* + s3*)/
(i + j + k) = (s1* + s2* + s3*)/ ![]() =
=
![]() .
.
![]() h = s(i + j + k),
h = s(i + j + k),
Другие рефераты на тему «Геология, гидрология и геодезия»:
Поиск рефератов
Последние рефераты раздела