Теория управления. Принципы системного анализа
17.2 Типы элементов
Элемент типа С.Элемент типа С характеризует емкость, инертность и другие подобные свойства моделируемой системы. Графическое изображение такого элемента (двухполюсника) показано на рис. 2, а. Для механических подсистем используют также иное условное обозначение (рис. 2, б), при этом параметру С присваивают символ т.
Компонентное уравнение (1) для элемен
та типа С имеет вид
![]() (4)
(4)
где F и V – соответствующие потоковые и потенциальные фазовые переменные.
В электрических подсистемах элемент типа С определяет электрическую емкость и описывается уравнением
![]() , (4a)
, (4a)
где I и U – соответственно сила тока и падение напряжения.
В механических подсистемах элемент С характеризует массу тела в уравнении второго закона Ньютона:
![]() . (46)
. (46)
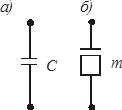
Рис. 2. Элемент типа С
Аналогично для механических вращательных подсистем формулу (4) можно записать в виде
![]() , (4в)
, (4в)
где М– момент силы; I – момент инерции; ![]() – угловая скорость.
– угловая скорость.
В тепловых подсистемах С характеризует теплоемкость тела C=dQ/dT, где dQ —изменение количества теплоты в теле при изменении температуры на dТ.
Компонентное уравнение (4) применительно к тепловому потоку Ф и температуре Т имеет вид
![]() (4г)
(4г)
где ![]() – теплоемкость тела, зависящая от удельной теплоемкости с и массы m тела:
– теплоемкость тела, зависящая от удельной теплоемкости с и массы m тела:![]() .
.
В гидравлических и пневматических подсистемах значения С характеризуют степень сжимаемости жидкости (газа) при плотности ρ и объеме V: C=pβV. При этом связь между давлением ρ и расходом Qm определяется формулой
![]() . (4д)
. (4д)
Аналогия уравнений типа (4) не является чисто формальной с точки зрения одинакового математического описания. Вероятно, за этой аналогией стоят скрытые закономерности, присущие природе в форме энергетических либо иных взаимных соответствий, тем более, что для всех рассмотренных подсистем между фазовыми переменными F и V существуют также аналогии для элементов типов L и R. Возвращаясь к элементу типа С, мы можем отметить, что С есть мера «емкости» или мера «инертности» при взаимодействии фазовых переменных в формах потока и потенциала, а точнее, при взаимосвязи потока со скоростью изменения потенциала. В механических подсистемах мерой инертности служит масса, в электрических и тепловых – емкость (теплоемкость). Изменение во времени потенциала (скорости движения в механических подсистемах, напряжения в электрической цепи, температуры при нагреве тела) приводит к изменению потока (движущей силы в механических системах, силы тока в электрических цепях, теплового потока при нагреве тел). Мерой взаимного соответствия этих изменений служит величина С. Чем больше емкость конденсатора, масса автомобиля, теплоемкость чайника с водой, тем труднее зарядить конденсатор до напряжения U, разогнать автомобиль до скорости v, нагреть воду до температуры Т.
Элемент типа L.Элемент типа L на эквивалентных схемах электрических и других подсистем изображают как катушку индуктивности (рис. 3, а). Для механических подсистем обычно используют условное обозначение пружины (рис. 3, б).
Компонентное уравнение для элемента типа L записывают в виде
![]() (5)
(5)
где V, F – потенциальная и потоковая фазовые переменные.
В электрических подсистемах элемент типа L определяет индуктивность, при этом напряжение U связано с силой тока I зависимостью
![]() . (5 а)
. (5 а)
Для механических подсистем компонентное уравнение
![]() (5 6)
(5 6)
может быть получено путем дифференцирования по времени уравнения пружины F= kx, где х – перемещение; k – жесткость пружины. В формуле (5, б) аналог электрической индуктивности L характеризует податливость пружины ![]() .
.
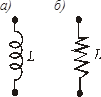
Рис. 3. Элемент типа L
Аналогичное компонентное уравнение можно получить для упругого стержня, используя закон Гука. При растяжении (сжатии) будем иметь
![]() ; (5 в)
; (5 в)
при изгибе
![]() ; (5 г)
; (5 г)
при кручении
![]() (5 д)
(5 д)
где Е, G – модули упругости при растяжении и сдвиге; А – площадь поперечного сечения; J, Jk – моменты инерции при изгибе и кручении.
В гидравлических и пневматических подсистемах давление р идеальной жидкости (газа) связано с массовым расходом Q уравнением
![]() (5 е)
(5 е)
где Lp – l/A зависит от длины трубопровода l и площади его поперечного сечения А. Для реальных жидкостей формула (5е) не учитывает массовые силы и гидравлическое сопротивление, которые могут быть учтены дополнительно
Элемент типа R. Условное графическое изображение элемента типа Rпоказано на рис. 4 для электрических (а) и механических (б) подсистем. Общее уравнение такого элемента имеет вид
F= V/R. (6)
В электрических подсистемах этому уравнению соответствует закон Ома
![]() ; (6 a)
; (6 a)
в механических — уравнение вязкого трения:
![]() (6 б)
(6 б)
где ![]() — величина, обратная коэффициенту вязкого трения;
— величина, обратная коэффициенту вязкого трения;
в гидравлических — отмеченное выше гидравлическое сопротивление:
![]() , (6 в)
, (6 в)
где ![]() – аналог электрического сопротивления (v – кинематическая вязкость; d, l — диаметр и длина трубопровода);
– аналог электрического сопротивления (v – кинематическая вязкость; d, l — диаметр и длина трубопровода);
в тепловых подсистемах:
![]() (6 г)
(6 г)
где тепловой поток Ф и температура Т зависят от конвекционного сопротивления Rk.
Другие рефераты на тему «Безопасность жизнедеятельности и охрана труда»:
Поиск рефератов
Последние рефераты раздела
- О средствах защиты органов дыхания от промышленных аэрозолей
- Обзор результатов производственных испытаний средств индивидуальной защиты органов дыхания (СИЗОД)
- О средствах индивидуальной защиты от пыли
- И маски любят счёт
- Правильное использование противогазов в профилактике профзаболеваний
- Снижение вредного воздействия загрязнённого воздуха на рабочих с помощью СИЗ органов дыхания
- О средствах индивидуальной защиты органов дыхания работающих