Моделирование рабочих процессов погрузочно-транспортных модулей с учетом случайного характера внешних воздействий
В этом выражении rб = const, а rк = rк(![]() к), так как в процессе поворота ковша изменяется радиус (плечо) приложения тяговой силы Sц.
к), так как в процессе поворота ковша изменяется радиус (плечо) приложения тяговой силы Sц.
Гидромеханический привод. Максимальный развиваемый момент механизма подъёма ковша определяется исходя из мощности двигателя Nдв, работающего на механизм подъёма, с учётом потерь в гидравлической и
механической частях системы:
 , (3.43)
, (3.43)
где Nдв – мощность двигателя; ![]() гц – скорость выдвижения штока, м/с;
гц – скорость выдвижения штока, м/с; ![]() пм – КПД механической части механизма подъёма ковша;
пм – КПД механической части механизма подъёма ковша; ![]() гп – КПД гидравлической части механизма подъёма ковша;
гп – КПД гидравлической части механизма подъёма ковша; ![]() – допустимая перегрузочная способность двигателя по моменту; rк – плечо силы, развиваемой гидроцилиндрами, относительно центра вращения ковша.
– допустимая перегрузочная способность двигателя по моменту; rк – плечо силы, развиваемой гидроцилиндрами, относительно центра вращения ковша.
Скорость выдвижения штока ![]() гц определяется по диаметру цилиндров dцп и расходу насоса qн, по общеизвестным соотношениям. Как правило, для гидромеханического привода динамическими процессами пренебрегают.
гц определяется по диаметру цилиндров dцп и расходу насоса qн, по общеизвестным соотношениям. Как правило, для гидромеханического привода динамическими процессами пренебрегают.
Как показано ранее, одним из важнейших ограничивающих факторов при оценке ковшовой погрузочной машины по производительности является максимальная глубина внедрения по силовым факторам механизма подъёма ковша. Условие, которое реализует это требование, имеет вид:
Mп.max ³ Mз.max(Sвн) + Mпк + ∆Mз.дин (Sвн), (3.44)
где Mз.max(Sвн) – максимальный статический момент сопротивлений черпанию, представляющий собой сумму моментов от преодоления сопротивлений сдвигу и подъёму горной массы; высчитывается по формулам (3.24) – (3.30); Mпк – момент сопротивления подъёму порожнего ковша относительно оси вращения ковша для данной глубины внедрения, Mп.к –величина постоянная; ∆Mз.дин(Sвн) – дополнительная динамическая составляющая от действия сил инерции механизма подъёма, включая ведомую часть привода, ковша и сдвигаемую горную массу.
Решение уравнения (3.44) и даст значение Sз.max, на которую допустимо внедрить ковш при раздельном черпании. Наибольшие трудности вызывает расчёт динамической составляющей на основании решения дифференциальных уравнений. При оценке оборудования определение динамической составляющей затруднено не столько методически, сколько технически: необходимо иметь в распоряжении расчётчика значения моментов инерции, размеры плеч и т.д. Эти данные в техническом описании погрузочной машины не приводятся, а их вычисление известными методами весьма трудоёмко.
Другой причиной высокой трудоёмкости определения ∆Mз.дин(Sвн) является необходимость многокритериального решения уравнений (3.40), (3.41) для различных фиксированных значений Sвн с последовательным построением искомой зависимости ∆Mз.дин(Sвн). Поэтому возникает стремление ограничиться приближёнными методами с определением возможной погрешности. По-существу, необходимо определить инерционную составляющую ведомой части трансмиссии, включая вращающиеся части редуктора, барабан, ковш и горную массу, сдвигаемую при зачерпывании. Очевидно, что вращающиеся массы редуктора не обладают существенной величиной момента от сил инерции. Главные составляющие – это моменты от сил инерции ковша и сдвигаемой призмы. Эти массы получают кратковременное угловое ускорение ![]() , величина которого определяется скоростью включения фрикционной муфты. Характер протекания переходных процессов представлен на рисунке 3.15. Позиции 1…4 относятся к ведущей, позиции 5…10 – ведомой части трансмиссии.
, величина которого определяется скоростью включения фрикционной муфты. Характер протекания переходных процессов представлен на рисунке 3.15. Позиции 1…4 относятся к ведущей, позиции 5…10 – ведомой части трансмиссии.
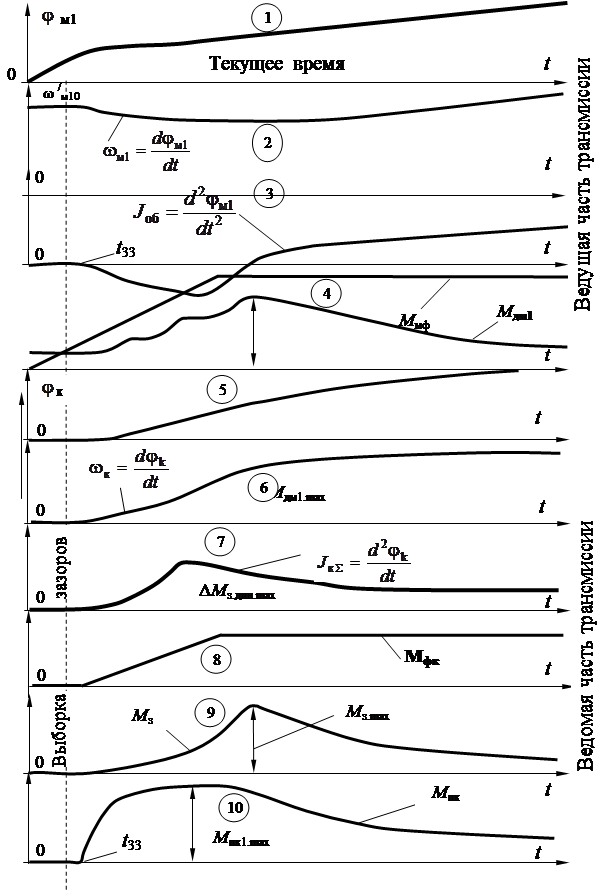
Рис. 3.15. Переходные процессы в механизме зачерпывания ШПМ типа 1ППН-5
Начало переходного процесса совпадает с включением фрикционной муфты, Mм.ф. возрастает (поз. 4), происходит выборка зазоров, провеса цепи в течение времени t. Ведущая часть трансмиссии воспринимает нагрузку, угловая скорость двигателя начинает падать (поз. 2), угловое ускорение отрицательно (поз. 3). После выборки зазоров начинает разгон ведомая часть системы, включая ковш и сдвигаемую горную массу. Угловая скорость и угловое ускорение сначала возрастают (поз. 6 и 7), реализуется максимальный момент от сил инерции ковша и груза ∆Mздин.max (поз. 7). Одновременно преодолевается момент сопротивлений зачерпыванию Mз, достигающий максимума в некоторой точке (поз. 9). Сопротивление повороту ковша оказывает также момент от сил тяжести ковша (поз. 10).
Момент двигателя Мдн представляет собой сумму Mз, Mпк и ∆Mздин Максимумы этих моментов не совпадают, поэтому зависимость Мдм1(t) может иметь несколько локальных экстремумов (поз. 4). В общем случае, как видно из диаграмм, максимальный момент на валу двигателя Мдн1 ≤ Mз.max +Mп.к.max + ∆Mздин.max. Эта величина не должна превышать предельно допустимый момент двигателя по заданной мощности с учётом перегрузочной способности двигателя.
Результаты моделирования динамики системы показывают, что для приближённых расчётов условие (3.44) можно представить в виде
Mп.max ³ Kдин.з Mз.max(Sвн), (3.45)
где Кдин.з. – коэффициент увеличения нагрузки за счёт динамических составляющих процесса и сопротивлений от подъёма собственно массы ковша. Так как ускорения ![]() малы, то Кдин.з.≤ 1,15.
малы, то Кдин.з.≤ 1,15.
Ниже на примере машины 1ППН-5 приводятся результаты расчёта Sз.max без учёта и с учётом инерционной составляющей (табл. 3.4).
Таблица 3.4
Исходные данные и результаты расчёта допустимой глубины внедрения ковша по силовым возможностям механизма черпания
|
Исходные данные и результаты расчёта |
Единицы измерения |
Численные значения |
|
1 |
2 |
3 |
|
Погрузочная машина 1ППН-5 | ||
|
Мощность главного привода, Nдв |
кВт |
14 |
|
Перегрузочная способность двигателя, |
- |
1,5 |
|
КПД механической передачи, |
- |
0,8 |
|
Частота вращения двигателя номинальная, nдв.ном. |
1/мин |
990 |
|
Передаточное число редукторов в цепи «двигатель – барабан», iрп |
- |
50 |
|
Радиус барабана, rб |
м |
0,12 |
|
Плечо силы натяжения цепи относительно оси вращения ковша, rк |
м |
0,42 |
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск