Страница
29
Анализ геометрических форм тел ссыпания и размеров ковша позволил выявить два принципиально различных случая (рис. 3.18):
1) ширина ковша такова, что объёмы ссыпания DV1 и DV2 не пересекаются; при этом ковш может быть заполнен на максимальную высоту lн;
2) ширина ковша Bк меньше Bк.min, объёмы ссыпания DV1 и DV2 пересекаются, максимально возможный уровень заполнения снижается до lQ.
На рисунке 3.18 и в приводимых ниже формулах обозначено: 1, 2, 3, 4 – участки торцевого сечения ковша, для которых определяются соответствующие площади F1…F4; Bк – ширина ковша; hст – высота задней стенки ковша; Sст – средняя длина боковой стенки ковша; ![]() к – угол отклонения днища ковша от вертикали в период перед разгрузкой ковша; Lкc – длина днища ковша; Lкcc – длина горизонтальная верхней стенки;
к – угол отклонения днища ковша от вертикали в период перед разгрузкой ковша; Lкc – длина днища ковша; Lкcc – длина горизонтальная верхней стенки; ![]() c – угол ссыпания груза на открытых поверхностях;
c – угол ссыпания груза на открытых поверхностях; ![]() ¢c – угол ссыпания груза в стеснённой области между стенками ковша; lн, lQ – высота точки заполнения ковша для различных вариантов; DVк1 – объём ссыпания через открытую сторону ковша; DVк2 – то же через сторону ковша с боковой стенкой.
¢c – угол ссыпания груза в стеснённой области между стенками ковша; lн, lQ – высота точки заполнения ковша для различных вариантов; DVк1 – объём ссыпания через открытую сторону ковша; DVк2 – то же через сторону ковша с боковой стенкой.
Случай 1. Максимальная вместимость ковша Vк.max:
- минимальная ширина, при которой объёмы ссыпания DV1 и DV2 не имеют общих зон:
![]() , (3.49)
, (3.49)
где lн – максимальное положение верхней точки заполнения:
lн = 0,5(hст × tgjc + Lксс (tgaк × tgjc + 1) + Lкс); (3.50)
- если Bк ³ Bк.min, то lн = lx и Vк.max определяется по формулам:
Vк.max = FSmax × Bк – DV1 – DV2; (3.51)
- максимальная площадь торцевой фигуры:
FSmax = F1 + F2 – F3 – F4; (3.52)
где F1= hст × lн; (3.53)
F2 = 0,5![]() × tgaк; (3.54)
× tgaк; (3.54)
F3 = 0,5 (lн – lкс)2 × tgjc; (3.55)
F4 = 0,5 (lн – lксс)2 × (tgaк + ctgjc); (3.56)
- максимальные объёмы ссыпания:
![]() ; (3.57)
; (3.57)
где i = 1 – открытая сторона ковша; i = 2 – сторона ковша с боковой стенкой;
![]() ; (3.58)
; (3.58)
![]() ; (3.59)
; (3.59)
![]() ; (3.60)
; (3.60)
![]() ; (3.61)
; (3.61)
- коэффициент потерь:
 . (3.62)
. (3.62)
Случай 2. Вместимость ковша Vк.max1 при Bк < Bк.min:
- уровень заполнения ковша грузом:
![]() ;
;
- оценка положения уровня груза относительно Lксс, Lкс и Sст, варианты:
(а) Lксс £ Lх < Lн; (б) Lкс £ Lх < Lксс;
(в) Sст £ Lх < Lкс; (г) 0 £ Lх < Sст;
- торцевая площадь:
(а) ![]() ; (б)
; (б) ![]() ; (в) и (г)
; (в) и (г) ![]() .
.
Площади F1…F4 определяются по (3.53) – (3.56) при lн = lQ:
- объёмы ссыпания:
а) DVi = DV1i + DV2i – DV3i – DV4i; б) DVi = DV1i + DV2i – DV3i;
в) и г) DVi = DV1i + DV2i.
Объёмы DV1i…DV4i определяются по (3.58) – (3.60) при lн = lQ.
Реальная вместимость ковша:
Vк.max1 = FS1 Bк. – DV1 – DV2.
Математические модели для расчёта фактического объёма груза, остающегося в ковше после черпания Vкз, коэффициент потерь ![]() п.
п.
Общие соотношения
Vкз = Fзач Ксм Bк. –  ,
,
где DV1 и DV2 – ранее определённые объёмы ссыпания через боковые стороны ковша; DV3 – объём, который не может поместиться в ковше из-за недостаточной вместимости:
DV3 = Fзач Ксм Bк. – Vк.max, при Bк. ³ Bк.min;
DV3 = Fзач Ксм Bк. – Vк.max1, при Bк. < Bк.min.
Объёмы DV1 и DV2 определяются по соотношениям (3.49) – (3.61) в зависимости от уровня заполнения ковша lx:
при Bк. ³ Bк.min и DV3 > 0 → lx = lн;
при Bк. < Bк.min и DV3 > 0 → lx = lQ.
Если DV3 < 0, то lx находится внутри диапазонов (а), (б), (в), (г). Конкретное значение lx определяется решением уравнения:
F(lx) = Fзач Ксм,
где F(lx) – торцевая площадь в зависимости от уравнения lx для вариантов (а), (б), (в), (г). Далее по унифицированным ранее приведённым моделям рассчитываются площади Fi и объёмы DVi,j.
Разработан алгоритм и программа в среде MathCad, позволяющая решать обе задачи (рис. 3.19). Программа построена так, что унифицированные операции вычисления площадей, объёмов ссыпания и уровня заполнения ковша выполняются отдельными подпрограммами.
Предлагаемая методика даёт возможность определить реальную вместимость ковша и фактический объём груза, остающийся в ковше после очередного черпания в функции глубины внедрения.
В целях проверки функционирования математических моделей и логики построения программы выполнен тестовый пример по анализу ковша машины МПК-3 (Bк = 1,0 м; Lксс = 1,1 м; Lкс = 0,85 м; hст = 0,6 м; Sст = 0,5 м; aк = 35о; jс = 45о; j¢с = 50о; Kсм = 1,4, крепость породы f = 7, 10, 13). Результаты моделирования приведены в таблицах 3.5 и 3.6. Глубина внедрения изменяется в пределах 0,3–1,0 м, что соответствует реальным значениям при погрузке различных пород.
 |

Рис. 3.19. Алгоритм расчёта вместимости ковша Vк.max или Vк.max1 и объёма, оставшегося в ковше после очередного черпания Vк.з
(начало; окончание см. на с. 84)
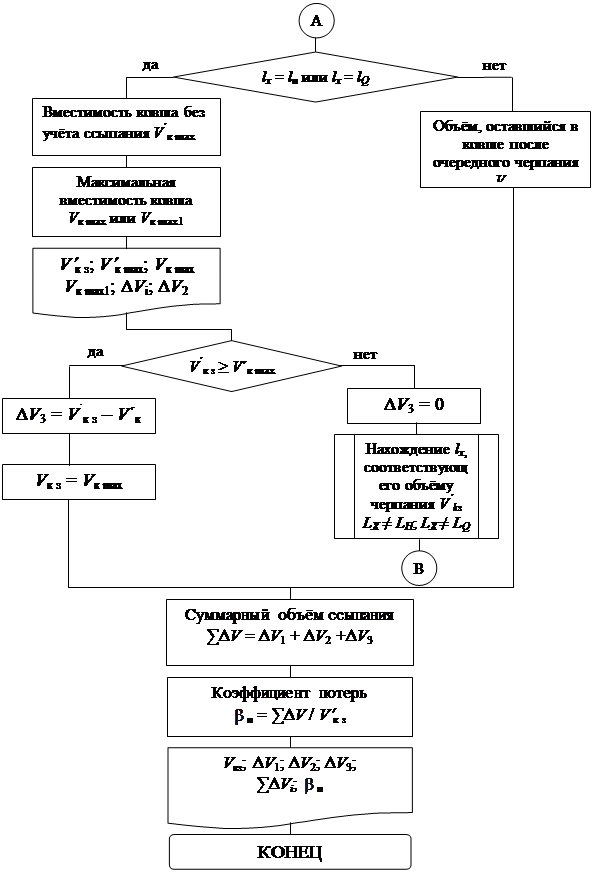
Рис. 3.19. Окончание (начало см. на с. 86)
Таблица 3.5
Максимальная вместимость ковша
|
Обозначения |
Численные значения |
|
Bк.min, м |
2,366 >> Bк |
|
lx, м |
lx= lQ = 0,846 |
|
DV1i, м3 |
DV11 = 0,18; DV12 = 0,119; DV13 = DV14 = 0 |
|
DV2i, м3 |
DV21 = 0,03; DV22 = 0,228; DV23 = DV24 = 0 |
|
V¢к.max |
0,758 |
|
Vк.max |
0,421 (по паспорту 0,6) |
|
bп |
SDV / V¢к.max = 0,44 |