Механизмы государственного регулирования общественного транспорта
В подходе, который можно назвать «динамическим», проблема должна восприниматься как неудовлетворённая потребность. С развитием общества и национальной экономики проявляются устойчивые тенденции повышения жизненного уровня населения и, как следствие, усиление потребности безопасности жизнедеятельности. Последняя тенденция имеет непосредственное влияние на нормативную базу системы безопасности дв
ижения, так как потребности людей обезопасить свою жизнь выливаются в ужесточение требований к безопасности всех элементов системы ОБДД. Таким образом, возникает объективная необходимость корректировать нормативно-законодательную базу ОБДД; исследование динамики потребностей создаёт предпосылки для определения величины нового нормативного состояния системы ОБДД; необходимо создать организационные предпосылки перехода системы ОБДД от старой к новой нормативной базе.
Описанный подход является основой для развития системы ОБДД, т.е. динамического её преобразования, а также оценки успешности таких изменений путём определения степени удовлетворения потребностей безопасной жизнедеятельности человека. Следовательно, динамический подход не только не конфликтует со статическим, но, напротив, является методологической основой формирования нормативной базы статического подхода, который, в свою очередь, служит основой процессов регулирования в системе ОБДД.
5.2 Концепция обеспечения безопасности АТС в эксплуатации
Предлагаемая концепция организации и управления в сфере обеспечения безопасности автотранспортных средств в эксплуатации базируется на системном принципе, который позволяет представить пути решения проблемы в её основных аспектах: теоретическом, методологическом и практическом, а также выделить и обосновать основные пути решения проблемы. Организацию и управление безопасностью автотранспортных средств рассмотрим как сложную, гетерогенную и открытую систему, которая должна обладать признаками целостности и полноты.
Особо следует остановиться на отличительной особенности системы организации и управления безопасностью автотранспортных средств – ином распределении свободы элементов в отношении иерархии системы и взаимосвязи субъект-объект управления. Если в обычной производственной системе, например, на автотранспортном предприятии, свобода элементов уменьшается с понижением уровня управления и водитель достаточно строго закреплён в своих действиях в существующей линейно-функциональной или иной организационно-управленческой структуре предприятия, то в рассматриваемой системе обеспечения безопасности автотранспортного средства водитель, хотя и находится на нижней ступени иерархии управления, обладает по отношению к ней значительно большей степенью свободы в сравнении с рядом высших и средних иерархических уровней системы и соответствующих элементов, которые призваны обеспечивать его безопасность (рис. 5.3).
В условиях специфического распределения свободы элементов системы управления безопасностью автотранспортных средств целесо образно применять на нижних уровнях управления преимущественно косвенные методы управления, разумно сочетая их с прямыми методами.
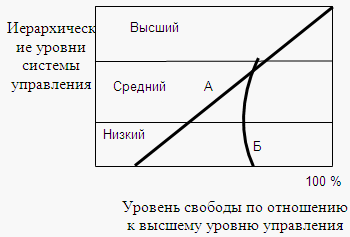
Рис. 5.3 Свобода элементов системы управления на разных иерархических уровнях:
А – традиционной системы управления предприятием;
Б – системы управления безопасностью автотранспортных средств
Системы управления безопасностью автотранспортных средств (СУБАТС) и безопасностью дорог являются частично совместными и взаимосвязанными, но иерархически независимыми. Такие взаимоотношения систем можно отразить с помощью метода простого категорического силлогизма, построив картину отношений трёх систем и категорий (рис. 5.4).
Такая особенность функционирования СУБАТС приводит к тому, что существенное влияние на безопасность АТС оказывает не только внешние факторы (среда), но и элементы других систем, например, пешеходы, которых необходимо учитывать, но которые остаются неуправляемыми для СУБАТС. Особое внимание необходимо уделить свободе выбора цели, т.к. эта оценка непосредственно используется для обоснования выбора методов управления.
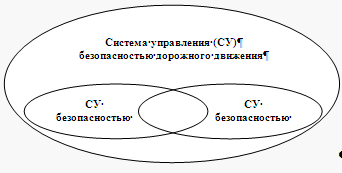
Рис. 5.4 Фигура силлогизма взаимосвязи систем управления безопасностью дорожного движения, АТС и автодорог
Если n – число конкурирующих целей объекта, то для всех основных уровней управления (высших и средних) СУБАТС n=T, h=0, т.к. для них существует одна основная цель – безопасность АТС.
Для низших уровней автотранспортных предприятий, а также исполнителей в СУБАТС типа постовых сотрудников ГИББД существует не одна, а по крайней мере две цели. Например, для инспекторов ДПС (это «низший» исполнительский уровень СУБАТС) существуют две цели: безопасность АТС и личная выгода. Для водителя, который управляет автомобилем (это низший эксплуатационный уровень СУБАТС), таких целей минимум три: безопасность АТС; личная выгода; экономические цели предприятия, т.е. n=3, h=0,5 (рис. 5.5).

Рис. 5.5 Оценка свободы элементов СУБАТС на разных уровнях иерархии.
Уровни иерархии СУБАТС:
1 – высший; 2 – средний; 3 – низший исполнительский; 4 – низший эксплуатационный
Из представленных материалов следует, что безопасность АТС как объекта управления СУБАТС не только зависит от многих факторов, но и существуют особые условия, в которых система управления распространяет своё влияние на объект. Поэтому целесообразно выделить АТС и другие объекты, управление которыми оказывает определяющее влияние на безопасность АТС (рис. 5.6). Например, Е.М. Олещенко [65] в качестве объекта управления выделяет систему «водитель-автомобиль-дорога». Можно считать, что неблагоприятные случаи, нарушающие безопасность АТС, проявляются не только в приведённой системе, но и во взаимодействии двух или нескольких АТС и водителей. Возможны и другие комбинации, отражающие сущность неблагоприятных ситуаций, которые приводят к нарушению безопасности АТС. Это, прежде всего, состояние внешней среды («водитель-автомобиль-дорога-окружающая среда») и условия эксплуатации.
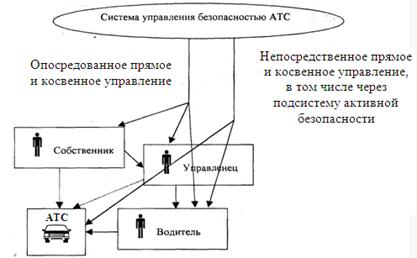
Рис. 5.6 Непосредственное и опосредованное управление безопасностью АТС
Поскольку объектом исследования является только часть системы управления безопасностью дорожного движения – СУБАТС, то, с одной стороны, исследовательская задача упрощается, и нам часто вполне достаточно рассматривать систему «водитель-автомобиль», но с другой, – говоря о безопасности АТС, следует отметить специфическую отдалённость основного объекта управления (АТС) от непосредственного воздействия субъекта управления, т.е. системы управления безопасностью АТС (СУБАТС). Последнее весьма специфическое свойство СУБАТС поясним на рисунке 5.6.
Эта схема наглядно показывает, что на нижнем уровне иерархии управления СУБАТС:
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск