Механизмы государственного регулирования общественного транспорта
Перед тем как подробнее остановиться на указанных выше системах, рассмотрим ещё один подход к изучению проблемы БДД. Очевидно, что одним из наиболее объективных параметров для оценки БДД является относительный показатель количества ДТП за некоторый промежуток времени. Если рассматривать макроскопический подход к причинному анализу возникновения ДТП, который опирается на том положении, что сущес
твуют так называемые «очаги ДТП» или критические точки на улично-дорожной сети, где по статистике вероятность возникновения ДТП наибольшая, то проблема сокращения их количества лежит в области рациональной организации дорожного движения.
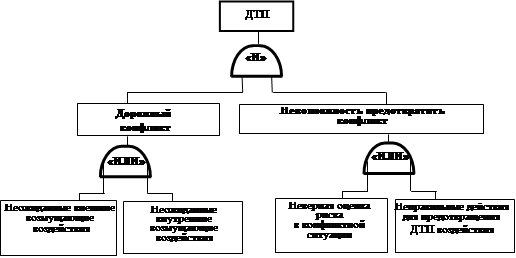
Рис. 5.11 Дерево причинной обусловленности ДТП
С точки зрения микроскопического подхода, существует множество конфликтных ситуаций и при нормальном невозмущённом движении транспорта. Подход основан на анализе процессов, происходящих в отдельной, единичной системе «водитель – ТС – окружающая среда движения», который производится при помощи так называемого «дерева причин ДТП» (рис. 5.11).
Не приводя дословно определение ДТП, а лишь указав первые два блока, способствующие его возникновению, можно заметить отличие ДТП от конфликтной ситуации, которая является лишь одним из условий возникновения ДТП. Второе обязательное условие возникновения ДТП заключается в неправильном поведении водителя в конфликтной ситуации. Эти два блока связаны логической операцией «И», т.е. для возникновения ДТП необходимо одновременное выполнение обоих условий. Появление конфликтной ситуации может быть обусловлено как помехами внутри ТС (например, неадекватные опасные управляющие воздействия, неумышленно произведённые самим водителем, или поломки в некоторых системах автомобиля), так и снаружи ТС (внезапно изменяющиеся характеристики дороги или непредвиденное поведение других участников движения). При этом происходит крайне негативный процесс изменения поведения водителя с третьего уровня на первый.
Предотвратить появление подобных ситуаций возможно только введением полностью автоматизированного решения задачи управления, исключив из неё человека, что на современном этапе пока недостижимо в силу приведённых ранее причин. Рассматривая проблемы повышения БДД с позиций данного подхода, мы снова приходим к необходимости разработки систем, которые позволят либо нейтрализовать избыточное управляющее воздействие, либо даже осуществить коррекцию недостаточных управляющих действий водителя.
Подобные системы будут связаны с соответствующими блоками низшего уровня «дерева» логической операцией «И», а следовательно, значительно сократят вероятность возникновения ДТП (рис. 5.12), т.к. при их наличии для реализации предпосылок ДТП необходимо не только одно из неправильных управляющих воздействий, но и одновременный с ним отказ системы, отвечающей за оптимизацию и контроль данных воздействий.
В истории развития этих систем система ABS была первой. Она ограничивала тормозное усилие, задаваемое управляющим воздействием водителя таким образом, чтобы была реализована максимальная сила сцепления, при которой торможение наиболее эффективно. Аналогично система автоматического контроля буксования (ASC) ограничивает чрезмерный входной сигнал со стороны водителя в момент нажатия его на педаль газа.
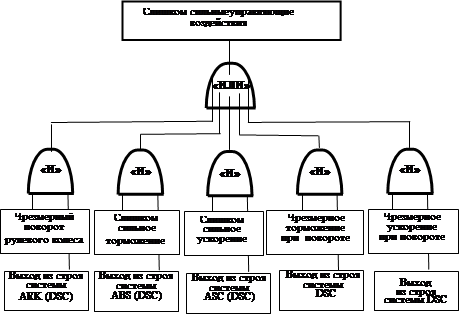
Рис. 5.12. Оптимизированная ветвь дерева причин ДТП «Избыточные (недостаточные) управляющие воздействия»
В системе активной кинематики задней подвески на ВМW реализован режим управления задними колёсами (ARK) таким образом, что она управляет поддержанием боковой устойчивости при движении автомобиля даже при экстремальных входных управляющих воздействиях. Это достигается путём перераспределения боковых усилий, воздействующих на переднюю и заднюю оси. И, наконец, система контроля динамической устойчивости (DSC) представляет собой комплексное решение для всех эксплуатационных режимов и почти всех видов предельных манёвров.
Важно отметить, что функционирование данных систем не вступает в прямой конфликт с управленческой ролью человека как субъекта управления, о котором было сказано выше, т.к. они фактически приводят к оптимальным параметрам управляющего воздействия, а именно этого и пытается достичь водитель. В качестве примеров практического решения приведём системы, оптимизирующие параметры управляемости и устойчивости ТС – важных показателей АБ ТС. Одним из показателей управляемости и устойчивости ТС при его манёврах на повороте является контроль бокового и поворачивающего смещения ТС относительно плоскости дороги, который осуществляется водителями ТС лишь применением управляющих воздействий к передним колёсам. Зачастую подобного контроля с единственной степенью свободы бывает недостаточно и для управления боковым смещением, и для необходимой ориентации продольной оси ТС в дорожных условиях постоянно изменяющегося маршрута движения. При этом водитель фактически не имеет никакой возможности контролировать негативное явление крена кузова.
Существует два основных способа помощи водителю в отношении дополнительных входных управляющих воздействий:
-дополнять (компенсировать) входное управляющее воздействие водителя для контроля траектории движения ТС;
-предотвращать или подавлять нежелательное неконтролируемое движение ТС, возникающее в результате воздействия водителя или от внешних сил.
Важным элементом применения технологии активного контроля является доступность адекватных приводных сил. Эти силы, воздействующие на движение ТС, могут быть получены различными способами. Большинство исследований до настоящего времени опираются на использование и контроль внешних сил, воздействующих на шины, и внутренние силы, возникающие в системе подвески ТС. Силы, действующие в контакте шины с дорогой, можно использовать различными способами. Во-первых, через боковые силы введением дополнительной степени свободы управляющего воздействия на колёса и, во-вторых, через разницу продольных сил на колёсах левой и правой сторон ТС. Интенсивный интерес к улучшению управляемости ТС был пробуждён в 80-х гг. XX в. новаторскими работами о возможностях применения дополнительного рулевого управления колёсами.
Исследовались различные методы использования управляемых задних колёс, а также возможность дополнительного рулевого управления для отдельных колёс. Принимая во внимание, что концепция управления четырьмя колёсами может эффективно использовать боковые силы на колёсах в пределах линейного режима работы шин при нормальных режимах движения, всё же надо констатировать высокую вероятность насыщения боковых сил в контакте шины, что ограничивает использование данной методики применительно к большим боковым ускорениям. С тех пор центр внимания в данном направлении сместился в сторону методик прямого контроля момента поворачивающего движения ТС, в соответствии с которыми используют шины как приводы продольных сил. Возникающий момент направляется на приложение тормозного или вращающего движения к соответствующим колёсам.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск